
Antoni Rosinol
Email:
Citations: 792 • h-index: 6 • i10-index: 6
Resume • GitHub • Google Scholar • Linkedin • Twitter
News
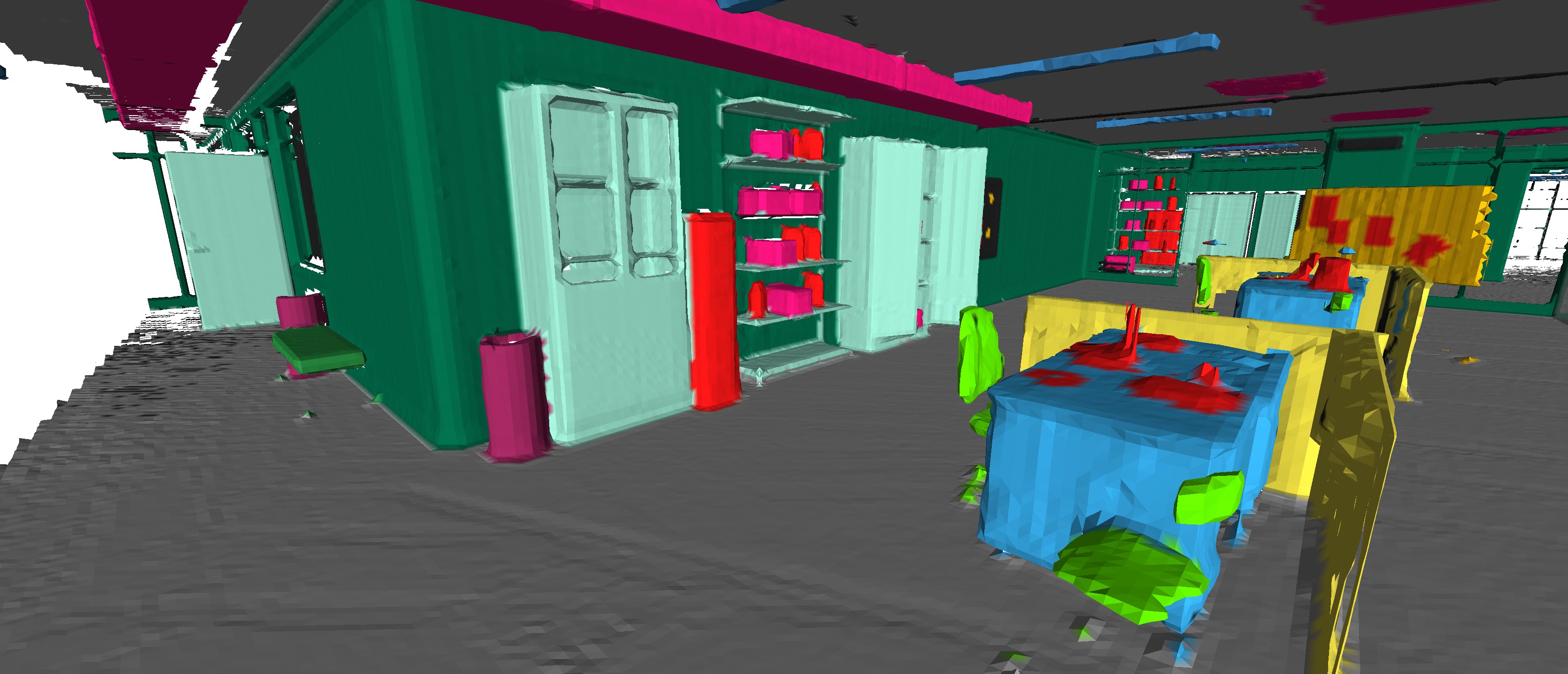
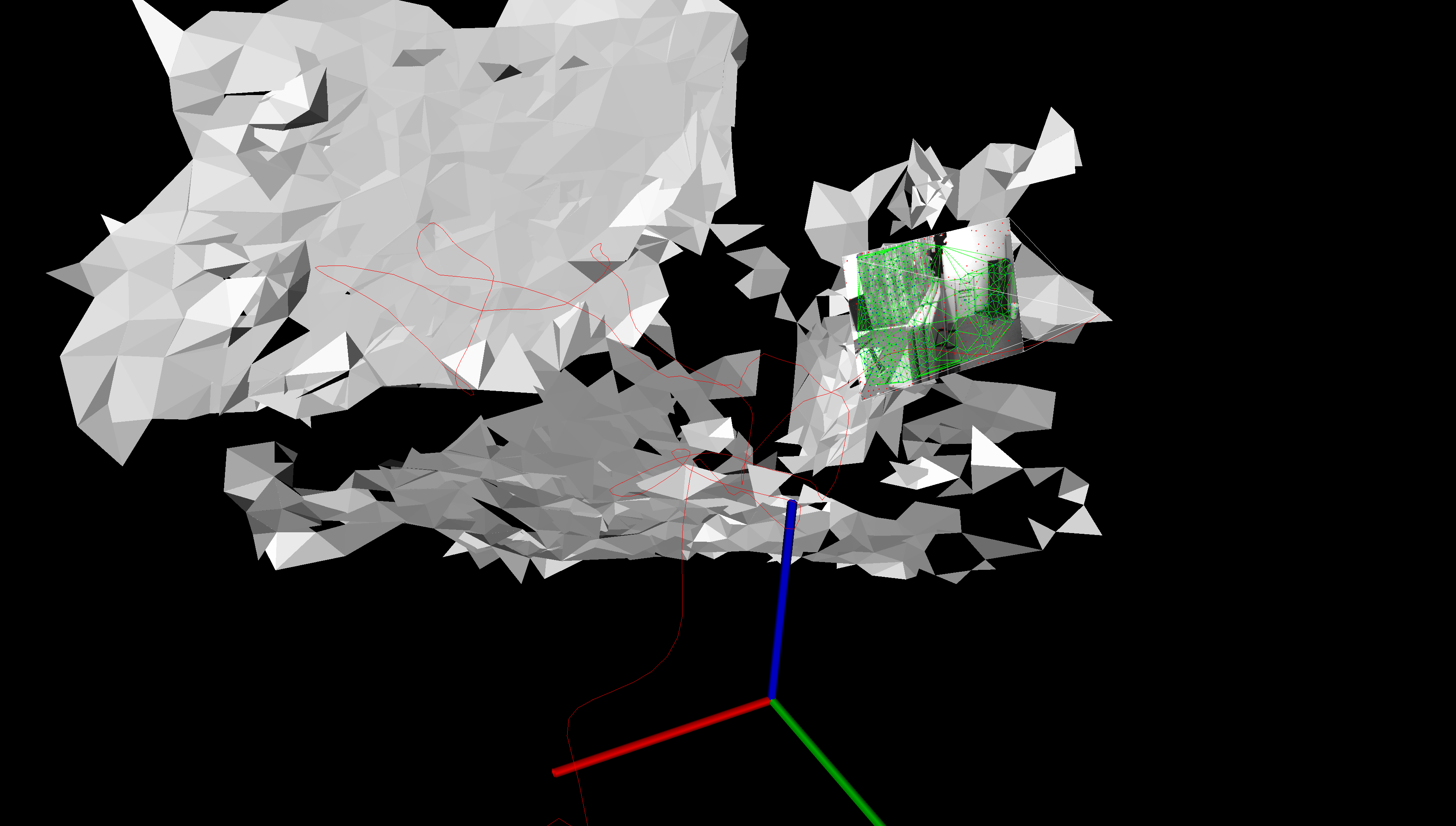
- [Oct 3, 2022] New WACV-accepted paper: Probabilistic Volumetric Fusion for Dense Monocular SLAM. Dense and accurate 3D mesh reconstruction of scenes in real-time from video!
- [May 4, 2022] Invited Talk at UPC, Barcelona.
- [Apr 26, 2022] I was awarded the prestigious Rafael del Pino Scholarship!
- [Apr 6, 2022] It was a great pleasure to present Kimera + 3D DSGs as an invited guest lecture for Prof. Ghaffari’s excellent course on MOBILE ROBOTICS. I also shared my thoughts about the Future of SLAM: i.e. tightly-coupling learning and SLAM + Differentiable Rendering. Btw, Maani’s lectures are a gem :). Video
- [Oct 17, 2021] Our workshop on Structural and Compositional Learning on 3D Data at ICCV was a great success! Thank you for attending! Here are all videos: Part A, Part B.
- [Sept 30, 2021] I will be co-chair of the Mapping II session at IROS this year, looking forward to it!
- [Apr 2, 2021] Gave an invited talk at Magic Leap on “Kimera: from SLAM to Spatial Perception with 3D Dynamic Scene Graphs”.
- [Mar 9, 2021] Gave an invited talk at the Robotics and Perception Group @ UZH on our Kimera journal paper!
- [Jan 1, 2021] At last! I just sent our IJRR Special Issue Journal paper: Wrapping up everything together and running in real-life scenarios is very very difficult, but, finally, here I present the work unifying all that Kimera represents: a Spatial Perception engine that opens new and exciting research directions.
- [Oct 6, 2021] We were invited to present an extended version of our 3D DSG paper at IJRR for the RSS2020 Special Issue!
[expand]
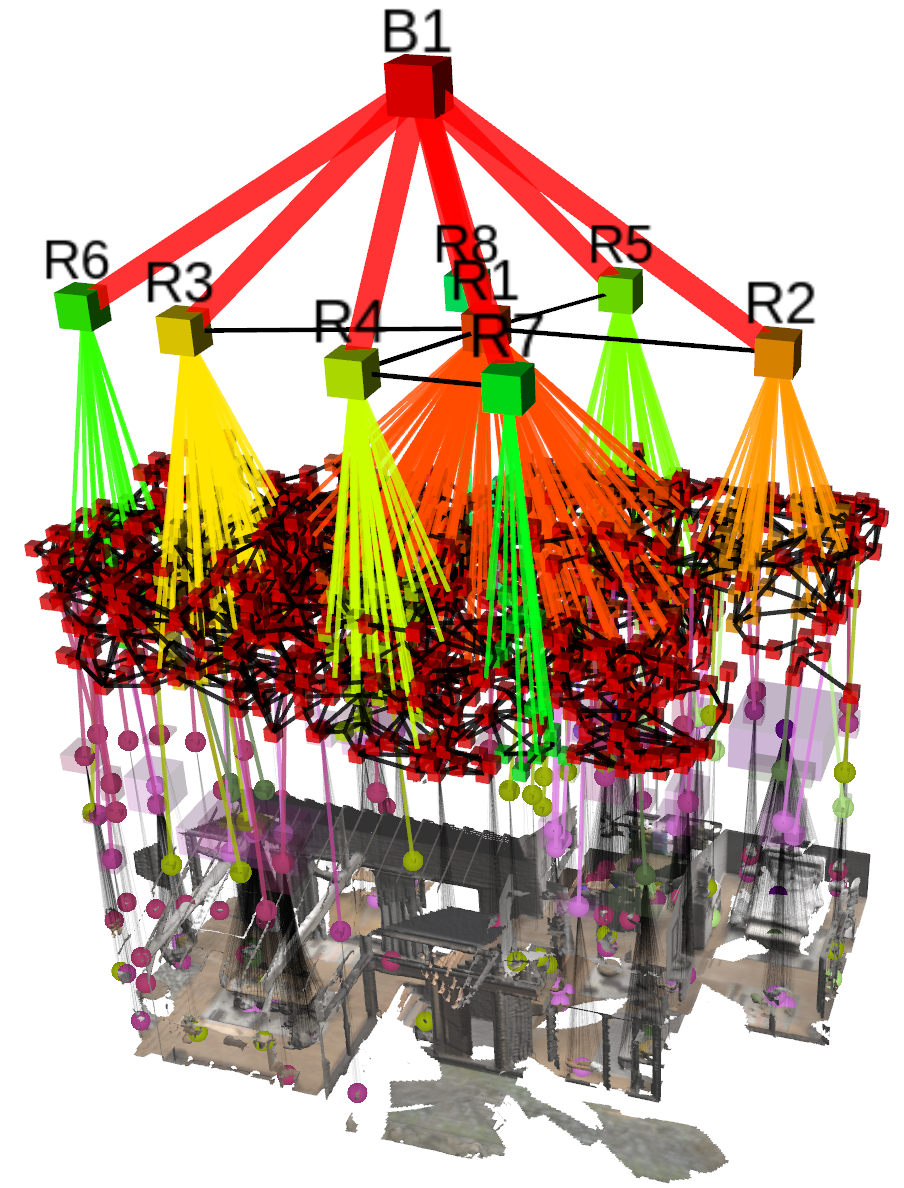
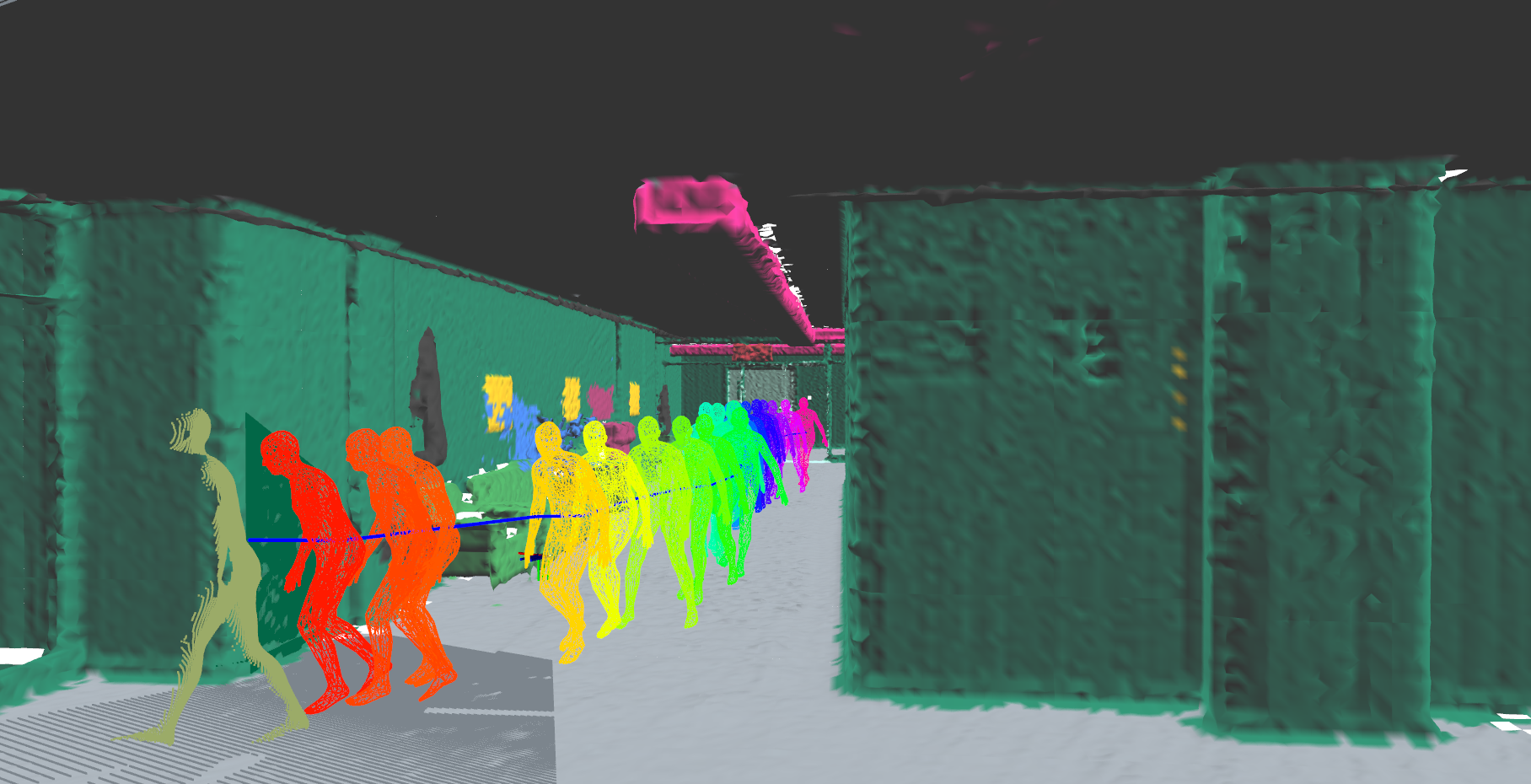
- [July 14, 2020] Presented 3D Dynamic Scene Graphs (DSG) @ RSS. In this video I show the structure of a 3D DSG, how we build it from visual-inertial data, and how we can use it for semantic path planning (with an actual query at the end of the video!).
- [Jun 12, 2020] Presented Kimera @ ICRAxMIT.
- [May 1, 2020] Checkout our Hands-On Tutorial on Kimera!
- [Feb 18, 2020] Excited to present our newest work: 3D Dynamic Scene Graphs, a unified representation for actionable spatial perception.
- [Dec 5, 2019] The metric-semantic reconstruction in Kimera is now much faster! Checkout the results here.
- [Sep 20, 2019] Open-Source release of Kimera! An accurate visual-inertial odometry pipeline with SLAM capabilities and multi-horizon 3D Mesh generation with Semantic annotations. Check https://github.com/MIT-SPARK/Kimera.
- [June 10, 2019] Presented our new work Kimera, a metric-semantic SLAM pipeline, at the Northeast Robotics Colloquium (NERC) 2019 at the University of Pennsylvania!
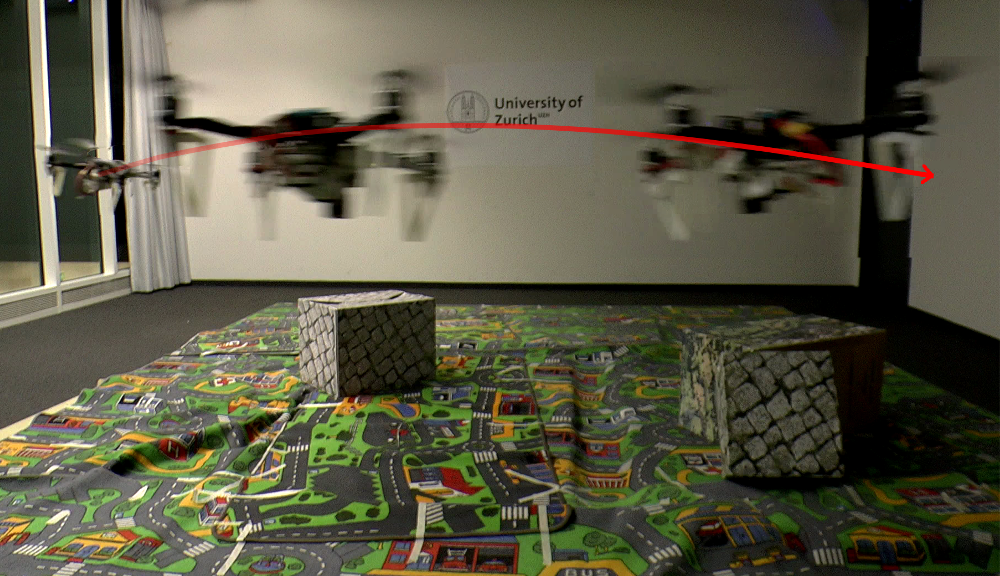
- [May 24, 2019] IEEE RAL’18 Best Paper Award Honourable Mention: Our paper UltimateSLAM received the IEEE Robotics and Automation Letters 2018 Best Paper Award Honourable Mention during the award session at the ICRA 2019 conference in Montreal. It ranked in the top 3 out of 520 papers published by RAL in 2018. The project’s website can be found here. [Paper][Video].
- [May 23, 2019] Presented our recent work Towards Real-Time Metric-Semantic Localization and Mapping with 3D Mesh Models at the 2nd International Workshop on Lines, Planes and Manhattan Models for 3-D Mapping (LPM 2019). We also show our newest 3D photo-realistic simulator and present our vision for the future of SLAM. [Slides].
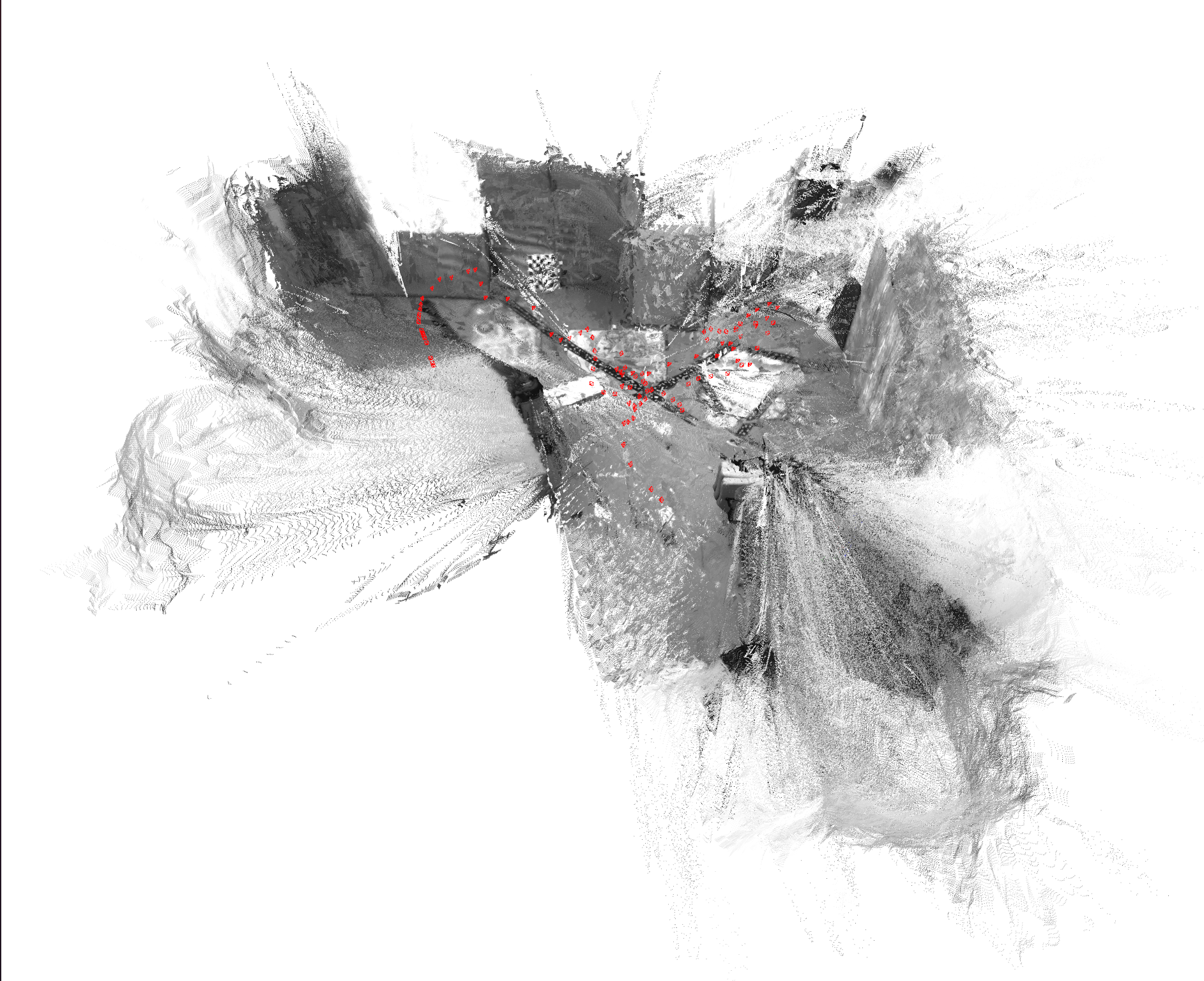
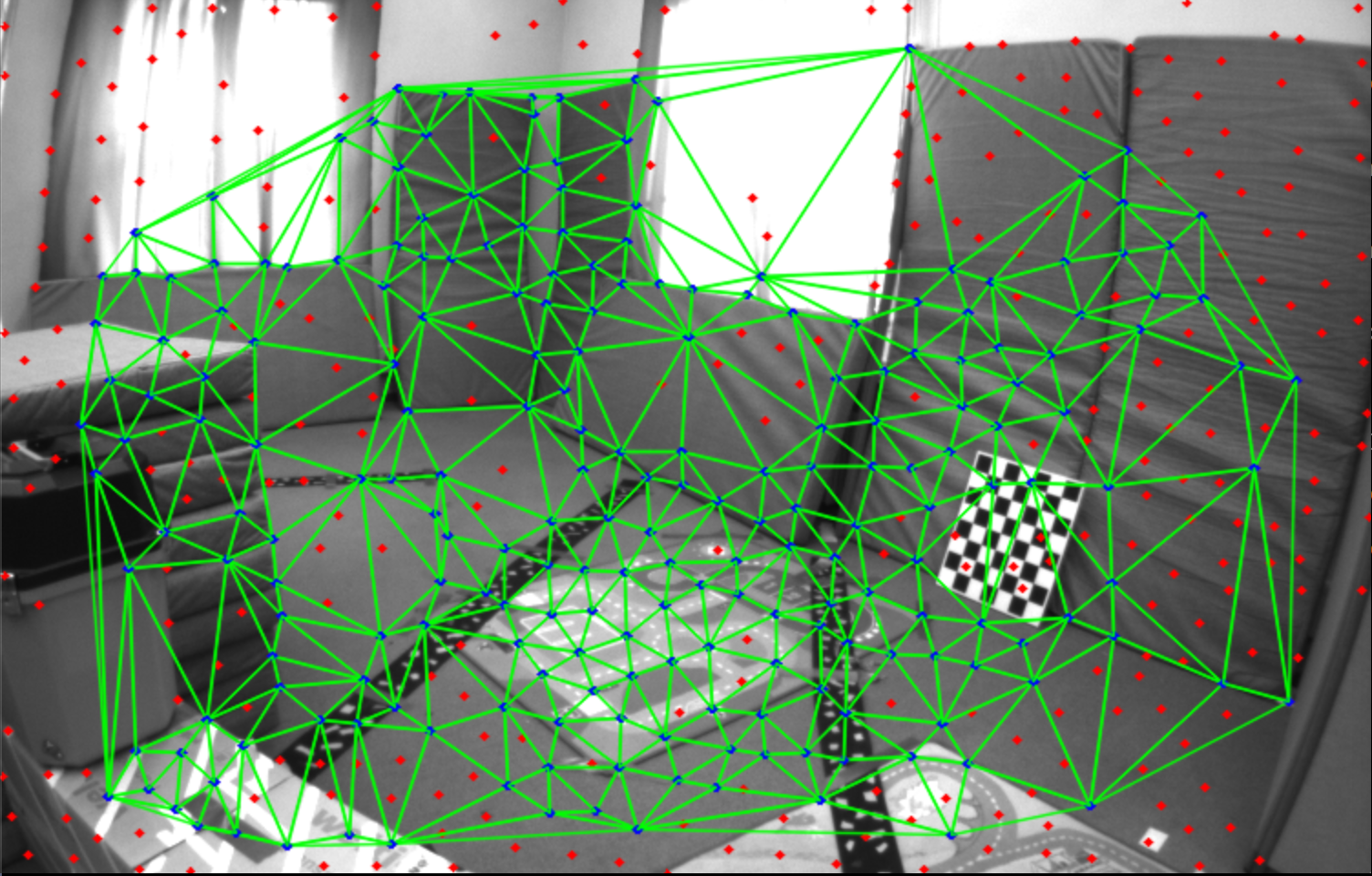
- [Jan 26, 2019] Our paper Incremental Visual-Inertial 3D Mesh Generation with Structural Regularities accepted at ICRA 2019. We show how to use structural regularities in the scene to improve localization and mapping performance in real-time. The project’s website can be found here. [Paper][Video]
[/expand]
Publications
Journal Papers
 Intl. J. of Robotics Research (2021)
Intl. J. of Robotics Research (2021)
Conference Papers
 IEEE Workshop on Applications of Computer Vision (WACV) (2022)
IEEE Workshop on Applications of Computer Vision (WACV) (2022)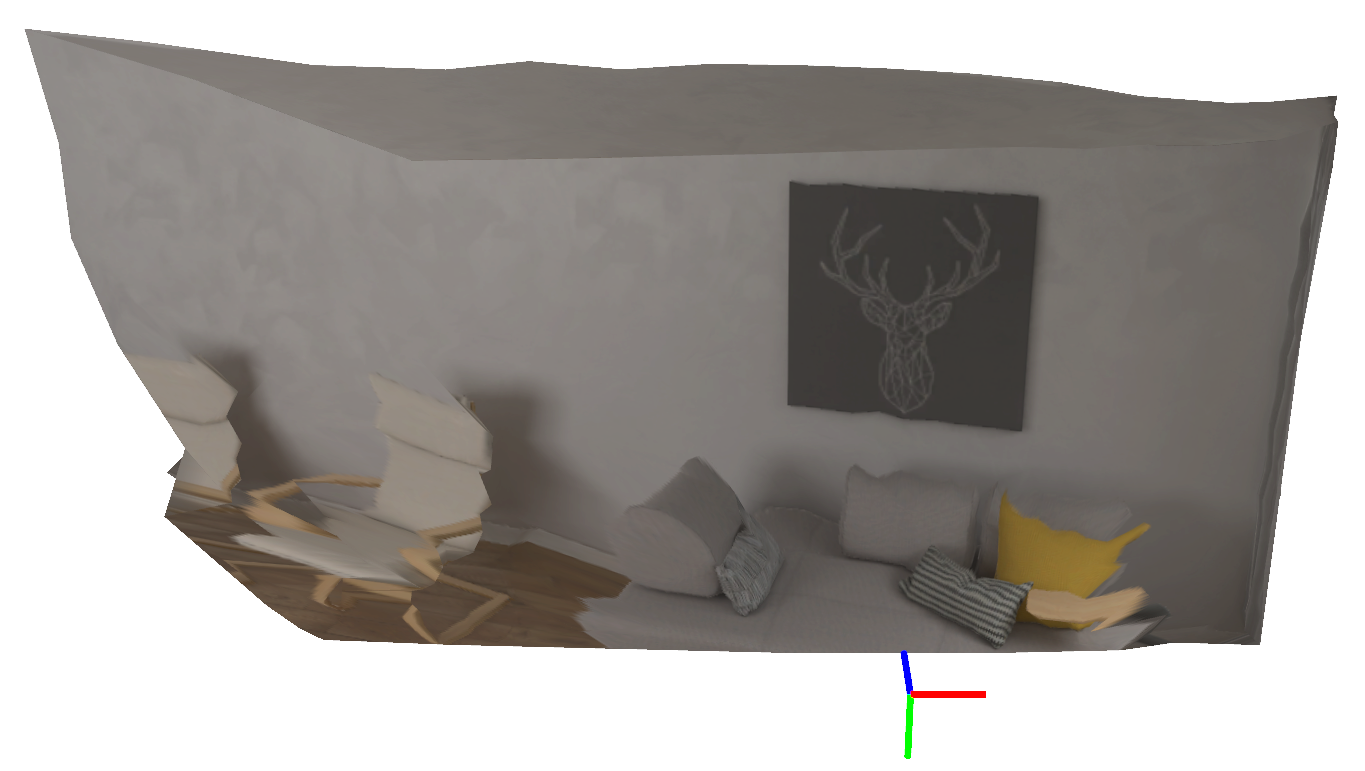 IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS) (2021)
IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS) (2021)
Code