Dr. Deepak Subramani
Assistant Professor, IISc Bangalore, India
Postdoc, MIT
Ph.D, Mechanical Engineering and Computation, MIT

About Me
From Jan 2019, I have joined IISc Bangalore as Assistant Professor in the Department of Computational and Data Sciences. Click here for my transition webpage.
I am a researcher with interests spanning the fields of ocean and atmospheric sciences, climate change, ship routing, development in resource constrained economies, public policy and education. I focus on developing fundamental knowledge and utilizing those to build usable systems that solve practical problems. During my Ph.D., I have developed a probabilistic regional ocean prediction system, optimal vehicle guidance schemes, and advisory services for sustainable fisheries management in India. Until Dec 2018, I am a post-doctoral associate at MIT working on bringing-to-market the inventions that I completed during my Ph.D.
Education
Nov. 2017
Ph.D. in Mechanical Engineering and Computational Engineering
Massachusetts Institute of Technology
Cambridge, MA
2014
S.M. in Computation for Design and Optimization
Massachusetts Institute of Technology
Cambridge, MA
2012
M.Tech and B.Tech in Mechanical Engineering
Indian Institute of Technology Madras
Chennai, Tamil Nadu, India
Work Experience
Dec. 2017 - Present
Postdoctoral Associate
Advisor: Prof. Pierre F.J. Lermusiaux
Massachuesetts Institute of Technology
Sept. 2012 - Nov. 2017
Graduate Research Fellow
Advisor: Prof. Pierre F.J. Lermusiaux
Massachusetts Institute of Technology
Aug 2011 - June 2012
Research Assistant
Advisor: Prof. C. Balaji
Indian Institute of Technology Madras
May 2011 - July 2011
Summer Research Scholar
Advisor: Prof. Timothy Chan
University of Toronto
May 2010 - July 2010
Summer Intern
Advisor: Dr. Manoharan
GE Global Research, John F. Welch Technology Center, Bangalore
May 2009 - July 2009
Summer Research Fellow
Advisor: Prof. R.L. Karandikar
Indian Institute of Science, Bangalore
Research Interests
Ocean Modeling
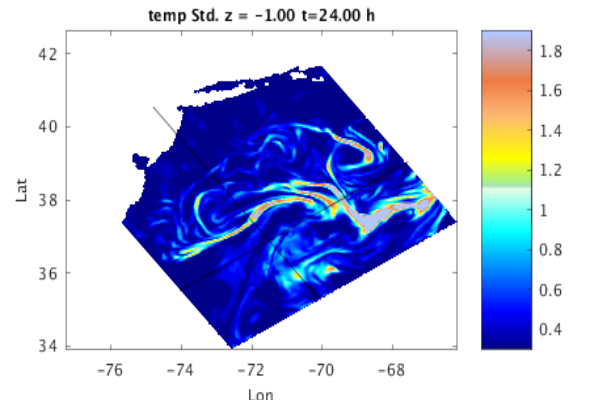
Development and applications of stochastic and deterministic primitive equation ocean modeling systems.
Computational Engineering
Development of novel numerical schemes and software systems for computational fluid dynamics, especially stochastic PDEs and parallel computing.
Uncertainty Quantification and Analysis
Probabilistic predictions and optimization utilizing dynamic stohcastic model order reduction schemes (e.g., Dynamically Orthogonal Field Equations).
Optimal Vehicle Guidance
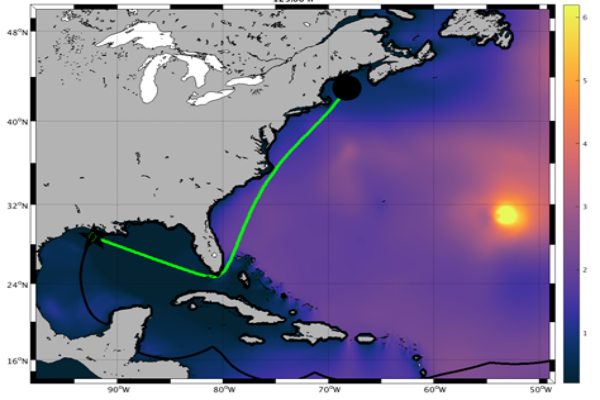
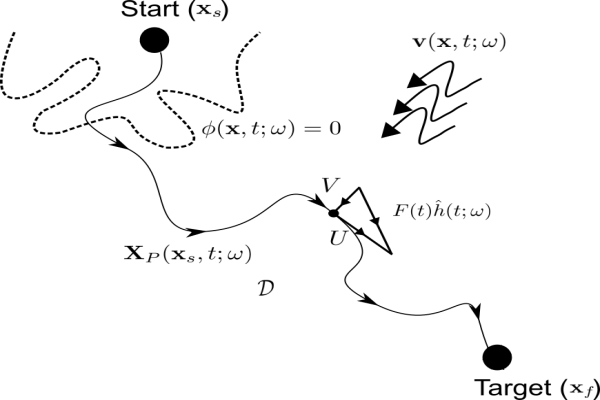
Combining state of the art environmental state forecasts (ocean, atmosphere, traffic etc.) with fundamental planning PDEs for time-, energy-, risk- optimal path planning of ships, AUVs, drones, cars etc.
Data Assimilation
Combining Models and Data for Geosciences and Climate Studies.
Designing for Resource-Contrained Economies
Cost-effective designs of practical and usable engineering solutions to societal problems in resource-contrained economies such as India. e.g., Potential Fishing Zone Advisory for marginal fishermen, disaster mapping and risk mitigation strategies for coastal cities.
Current Projects

Honors/Awards
First Place, Graduate Science, May 2017
Awarded at the de Florez Competition, MIT
Wunsch Foundation Silent Hoist & Crane Award for Outstanding Research, 2017
Awarded annually to a graduate student in the Department of Mechanical Engineering, MIT
Best Presentation Award, Tata Pro Seminar, May 2017
One among four awarded at the annual Society of Tata Fellows Induction, MIT
Best Live Demonstration/Prototype Award, Sept 2016
Awarded at the Mechanical Engineering Research Symposium, MIT
Esteemed Presenter Award: Best Theoretical/Computational Presentation, Sept 2015
Awarded at the Mechanical Engineering Research Symposium, MIT
Honourable Mention Award in Graduate Science, May 2015
Awarded at the de Florez Design Competition, MIT
Best Poster Award, Mar 2015
Awarded at the Centre for Computational Engineering Symposium, MIT
Runner-up Poster Award, Nov 2014
Awarded at the Dynamic Data Driven System Sciences Conference (DyDESS) 2014
Highest GPA Award, 2012
Awarded to the senior with highest GPA in Mechanical Engineering at IIT Madras
MITACS Globalink Scholarship
Awarded to top 2% of juniors across Indian Universities to undertake research in Canada. Link here.
GE Foundation Leader Scholar 2009-11
Awarded to roughly 200 students among 14 countries. Link here
National Talent Scholar, 2005
Awarded to top 0.01% of among 150,000+ applicants by Government of India through a three stage competitive exam
CBSE Merit Certificates, 2005 and 2007
Awarded to top 0.01% of passed candidates in 10th grade and 12th grade national exams by Central Board of Secondary Education, India
Publications
Papers in Peer-Reviewed Journals
- Subramani, D. N., P. J. Haley, Jr., and P. F. J. Lermusiaux (2017),Energy-optimal path planning in the coastal ocean, J. Geophys. Res. Oceans,122, 3981–4003, doi:10.1002/2016JC012231. PDF
- Sun, W., P. Tsiotras, T. Lolla, D. N. Subramani, and P. F. J. Lermusiaux (2017). Multiple-Pursuer-One-Evader Pursuit Evasion Game in Dynamic Flow Fields. Journal of Guidance, Control and Dynamics. DOI: 10.2514/1.G002125 PDF
- Subramani, D.N. and P.F.J. Lermusiaux (2016). Energy-optimal Path Planning by Stochastic Dynamically Orthogonal Level-Set Optimization. Ocean Modeling, 100, 57–77. DOI: 10.1016/j.ocemod.2016.01.006 PDF
- Subramani, D., Chandrasekar, R., Ramanujam, K.S. and C. Balaji (2014). A new ensemble-based data assimilation algorithm to improve track prediction of tropical cyclones. Natural Hazards 71: 659. doi:10.1007/s11069-013-0942-1 PDF
- Ramanujam, S., R. Chandrasekar, D.N. Subramani, and C. Balaji (2012) On the Effect of Non-Raining Parameters in Retrieval of Surface Rain Rate Using TRMM PR and TMI Measurements PDF
Under review or preparation
- Subramani, D.N., Q.J. Wei and P.F.J. Lermusiaux (2017). Stochastic Time Optimal Path Planning in Uncertain Flows. Computer Methods in Applied Mechanics and Engineering. Sub-judice. Submitted PDF
- Subramani, D.N. and P.F.J. Lermusiaux (2017). Risk Optimal Path Planning under Uncertainty. To Be Submitted. Abstract
- Subramani, D.N., P.J. Haley and P.F.J. Lermusiaux (2017). Stochastic Dynamically Orthogonal Primitive Equations: Theory and Applications. To Be Submitted. Abstract
Proceedings of Peer-Reviewed Conferences
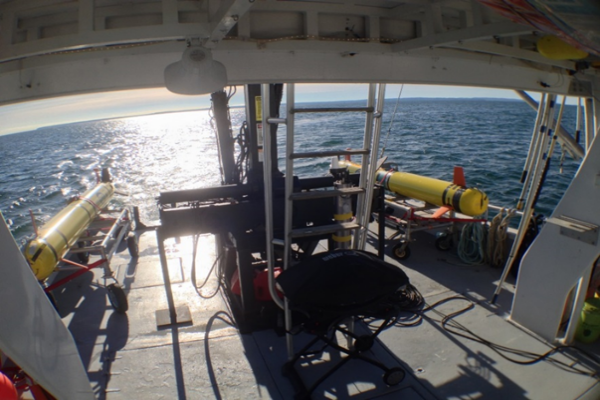
- Subramani, D. N., P. F. J. Lermusiaux, P.J. Haley, Jr., C. Mirabito, S. Jana, C. S. Kulkarni, A. Girard, D. Wickman, J. Edwards, J. Smith, 2017. Time-Optimal Path Planning: Real-Time Sea Exercises. In: Oceans '17 MTS/IEEE Aberdeen, 19-22 June 2017, In press.PDF
- Subramani, D. N., Lolla, T., Haley Jr., P. J., Lermusiaux, P. F. J., 2015. A stochastic optimization method for energy-based path planning. In: Ravela, S., Sandu, A. (Eds.), DyDESS 2014. Vol. 8964 of LNCS. Springer, pp. 347-358. PDF
- Mirabito, C., D.N. Subramani, T. Lolla, P.J. Haley, Jr., A. Jain, P.F.J. Lermusiaux, C. Li, D.K.P. Yue, Y. Liu, F.S. Hover,N. Pulsone, J. Edwards, K.E. Railey, and G. Shaw, 2017. Autonomy for Surface Ship Interception.In: Oceans '17 MTS/IEEE Aberdeen, 19-22 June 2017, In Press. PDF
- Edwards, J., J. Smith, A. Girard, D. Wickman, P.F.J. Lermusiaux, D.N. Subramani, P.J. Haley, Jr., C. Mirabito, C.S. Kulkarni, and,S. Jana, 2017. Data-driven Learning and Modeling of AUV Operational Characteristics for Optimal Path Planning. In: Oceans '17 MTS/IEEE Aberdeen, 19-22 June 2017, In Press.PDF
- Sun, W., P. Tsiotras, T. Lolla, D. N. Subramani, and P. F. J. Lermusiaux, 2017. Pursuit-Evasion Games in Dynamic Flow Fields via Reachability Set Analysis. 2017 American Control Conference. In press.PDF
Contact
77 Massachusetts Avenue, Rm 5-426a
Cambridge, MA 02139 Mobile Number
857 253 9750 Email
deepakns@mit.edu