| |
| Home Bat Flight Flapper Design Tool Development Future Projects Publications Contact the Team |
| Computational Simulations of Bat Flight |
Bats are unique animals, and present a very compelling model for small scale animal flight. The following characteristics of bats and their accomplishment of flight are particularly interesting for inspiring developments in unmanned aerial vehicle design:
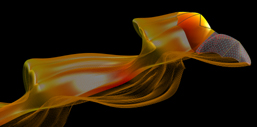
In this project we are examining the aero-structural characteristics of bat flight to determine the applicability of similar structural strategies in vehicle design. Our collaborators at Brown University (Breuer Lab and Swartz Lab) provide state of the art high speed stereo digital video capture of bats in flight (both in windtunnels and flight cages). This video data is processed using state of the art motion capture approaches. Following motion capture a 3-dimensional reconstruction and surface model of the bats are constructed. These high fidelity, time accurate models of bat flight provide an accurate shape which can be analysed using computational methods. Using several different computational tools, we are examining the flight and efficiency of flight. The computational tools which are considered are HallOpt, ASWING, FastAero, and 3DG. Each of these tools is briefly highlighted below (See the tools page for details):
Please explore the links to the Right Hand Side to learn more about the project.
The current project has been funded by several different sources at different times. We are very thankful to the following funding sources: Singapore-MIT Alliance (SMA), National Science Foundation (NSF), Natural Science and Engineering Councile of Canada (NSERC), and the Air Force Office of Scientific Research.
|
Copyright 2007, MIT. All rights reserved.
Aerospace Computational Design Laboratory, Department of Aeronautics and Astronuatics. Massachusetts Institute of Technology.
| More Details | ||
|
||


