| |
| Home Bat Flight Flapper Design Tool Development Future Projects Publications Contact the Team |
| FastAero |
Potential flow codes represent an extremely
efficient and accurate means to compute un-separated flow around complex
geometries. The aim of this code project was to develop a code capable of
rapidly solving potential problems around complex geometries in a rapid,
hands-off manner.
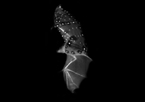
FastAero2D FastAero2D is a two-dimensional potential flow solver
coupled with a simple spring-mass representation of the structural dynamics.
The 2-Dimensional potential flow code exploits and iterative GMRES [6] solver
for rapidly solving the linear system. The potential flow problem is discretized using linear basis functions on flat panels.
Both a thin surface (velocity) formulation and a thick body (Greens Theorem
Thick Body Formulation) have been developed. The unsteady 2-D wake vorticity is represented using a linear element freely convecting, self-influencing wake. As a result the wake
will convect and roll-up under the local velocity
influence (as seen in figure 1).
FastAero3D FastAero3D[1] is
an advanced, 3-Dimensional unsteady panel method solver developed at MIT. The code incorporates an
accelerated iterative solution approach through the use of the precorrected-FFT[3] and Fast Multipole Algorithms[4] (Matrix Vector Product (MVP) acceleration). Through the use of matrix-multiply
accelerations, intermediate time-step solutions can be performed very rapidly.
As such, the solution of highly resolved unsteady potential flows is possible.
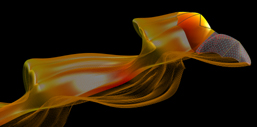
Figure: A plot of the FastAero3D solution around a business jet configuration. In this
image the features of the FastAero3D solution are illustrated. The body of the business jet is represented using a
boundary element surface triangular discretization.
The localized vorticity in the wake is represented using
the vortex particle method (VPM).
References
The current project has been funded by several different sources at different times. We are very thankful to the following funding sources: Singapore-MIT Alliance (SMA), National Science Foundation (NSF), Natural Science and Engineering Councile of Canada (NSERC), and the Air Force Office of Scientific Research. |
Copyright 2007, MIT. All rights reserved.
Aerospace Computational Design Laboratory, Department of Aeronautics and Astronuatics. Massachusetts Institute of Technology.
| Sample Simulations | ||
|
||