
page last updated: Dec 1, 2021, see google scholar for more recent publications!
2021 |
|
|
32. VISTA 2.0: An open, data-driven simulator for multimodal sensing and policy learning for autonomous vehicles
Amini, A.*, Wang, T.*, Gilitschenski, I., Schwarting, W., Liu, Z., Han, S., Karaman, S., Rus, D. arXiv:2111.12083 preprint (under review). 2021 [paper] Data-driven simulation of LiDAR and event cameras for policy learning and zero shot deployment. |

|
31. Learning interactive driving policies via data-driven simulation
Wang, T.*, Amini, A.*, Schwarting, W., Gilitschenski, I., Karaman, S., Rus, D. arXiv:2111.12137 preprint (under review). 2021 [paper] Data-driven simulation capable of inpainting novel multi-agent into the view of the ego agent for transferable policy learning. |
|
30. Closed-form continuous-depth models
Hasani, R.*, Lechner, M.*, Amini, A., Liebenwein, L., Tschaikowski, M., Teschl, G., Rus, D. under review. 2021 A closed-form solution for a class of ODE-based neural models that achieves a 150x speedup and superior accuracy. |

|
29. Causal Navigation by Continuous-time Neural Networks
Vorbach, C.*, Hasani, R.*, Amini, A., Lechner, M., Rus, D. NeurIPS. 2021 [paper] Demonstrate that continuous-time neural models are dynamic causal models capable of interpretable, causal and robust visual navigation |
|
28. Sparse flows: Pruning continuous-depth models
Liebenwein, L.*, Hasani, R.*, Amini, A., Rus, D. NeurIPS. 2021 [paper] For continuous-time normalizing flows, pruning is all you need! |
|
27. Evidential Deep Learning for Guided Molecular Property Prediction and Discovery
Soleimany, A.*, Amini, A.*, Goldman, S.*, Rus, D., Bhatia, S., Coley, C. ACS central science. 2021 [paper] Fast & scalable uncertainty estimation enables improved molecular property prediction, accelerated optimization, and guided virtual screening. |

|
26. Efficient and Robust LiDAR-Based End-to-End Navigation
Liu, Z.*, Amini, A.*, Zhu, S., Karaman, S., Han, S., Rus, D. IEEE ICRA. 2021 [paper] [web] [video] [news] A novel deep model for efficiently processing 3D pointclouds and fusing with uncertainty for added robustness during sensor failures. |

|
25. Co-Learning of Task and Sensor Placement for Soft Robotics
Spielberg, A.*, Amini, A.*, Chin, L., Matusik, W., Rus, D. IEEE Robotics and Automation Letters. 2021 [paper] [video] [news] Best Paper Finalist: 2.5%, Joint presentation at RA-L & Robosoft
Dual objective learning combined with sparse binary optimization enables jointly positioning discrete sensors and task learning. |
|
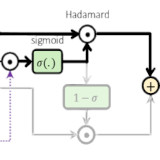
24. Liquid time-constant networks
Hasani, R.*, Lechner, M.*, Amini, A., Rus, D., Grosu, R. AAAI Conference on Artificial Intelligence. 2021 [paper] [news] Oral spotlight
A novel continuous-time neuron model with a dynamically changing (liquid) time-constant enables improved representation learning. |
2020 |
|
|
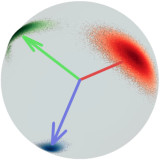
23. Deep evidential regression
Amini, A., Schwarting, W., Soleimany, A., Rus, D. NeurIPS. 2020 [paper] [code] [news] Fast, scalable uncertainty estimation algorithm for deep neural networks trained on regression tasks. |

|
22. Neural circuit policies enabling auditable autonomy
Lechner, M.*, Hasani, R.*, Amini, A., Henzinger, T., Rus, D., Grosu, R. Nature Machine Intelligence. 2020 [paper] [code] [video] A novel bio-inspired neural model enables 100x smaller and more auditable networks for end-to-end autonomous driving. |
|
21. Uncertainty Aware Texture Classification and Mapping Using Soft Tactile Sensors
Amini, A.*, Lipton, J.*, Rus, D. IROS. 2020 [paper] A Bayesian deep learning approach to soft tactile sensing using GelSight |
|
20. A Natural Lottery Ticket Winner: Reinforcement Learning with Ordinary Neural Circuits
Hasani, R.*, Lechner, M.*, Amini, A., Rus, D., Grosu, R. ICML. 2020 [paper] A class of Neural-ODE's with dynamic time-constants enable emergent "lottery ticket" sparse networks. |

|
19. Learning robust control policies for end-to-end autonomous driving from data-driven simulation
Amini, A., Gilitschenski, I., Phillips, J., Moseyko, J., Banerjee, R., Karaman, S., Rus, D. IEEE Robotics and Automation Letters. 2020 [paper] [video] [news] Joint presentation at RA-L & ICRA
Data-driven simulation for RL policy learning. First demonstration of end-to-end vehicles, trained using RL in simulation, directly transferred into the real world. |
2019 |
|

|
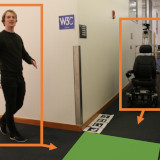
18. Infrastructure-free nlos obstacle detection for autonomous cars
Naser, F., Gilitschenski, I., Amini, A., Liao, C., Rosman, G., Karaman, S., Rus, D. IROS. 2019 [paper] [video] [news] Dynamic shadow detection allows for agents to detect moving objects earlier than other perception sensors. |
|
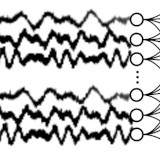
17. Response characterization for auditing cell dynamics in long short-term memory networks
Hasani, R.*, Amini, A.*, Lechner, M., Naser, F., Grosu, R., Rus, D. 2019 International Joint Conference on Neural Networks (IJCNN). 2019 [paper] Oral spotlight
A framework for auditing deep networks trained on time-series data. |

|
16. Variational end-to-end navigation and localization
Amini, A., Rosman, G., Karaman, S., Rus, D. IEEE ICRA. 2019 [paper] [video] [news] Best Paper Finalist: 0.1%
End-to-end learning algorithm for navigation control and probabilistic pose localization based on visual inputs and noisy GPS. |
|
15. Deep orientation uncertainty learning based on a bingham loss
Gilitschenski, I., Sahoo, R., Schwarting, W., Amini, A., Karaman, S., Rus, D. ICLR. 2019 [paper] Learning pose and orientation from visual inputs while capturing uncertainty and rotational ambiguity. |
|
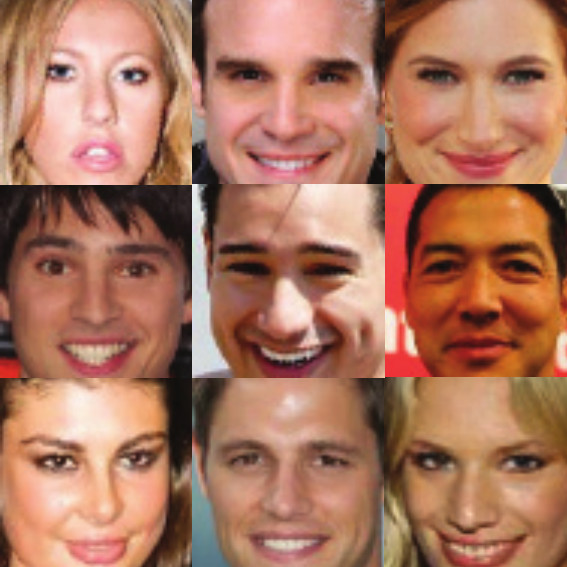
14. Uncovering and mitigating algorithmic bias through learned latent structure
Amini, A.*, Soleimany, A.*, Schwarting, W., Bhatia, S., Rus, D. AAAI/AIES. 2019 [paper] [news] A general algorithm for adaptively re-weighting samples to overcome hidden and harmful dataset biases. Drastically improve existing face detectors. |
2018 |
|

|
13. Variational autoencoder for end-to-end control of autonomous driving with novelty detection and training de-biasing
Amini, A., Schwarting, W., Rosman, G., Araki, B., Karaman, S., Rus, D. IROS. 2018 [paper] [video] Variational approach to end-to-end driving along with algorithms for overcoming data imbalances and identifying dangerous OOD edge-cases. |
|
12. Shadowcam: Real-time detection of moving obstacles behind A corner for autonomous vehicles
Naser, F., Gilitschenski, I., Rosman, G., Amini, A., Durand, F., Torralba, A., Wornell, G., Freeman, W., Karaman, S., Rus, D. IEEE ITSC. 2018 [paper] Shadow detection to sense movement even when it is out of sight. |

|
11. Robust end-to-end learning for autonomous vehicles
Amini, A. MIT Master's Thesis. 2018 [paper] Probabilistic end-to-end (perception-to-control) learning of autonomous vehicles enables greater robustness during deployment. |
|
10. Learning steering bounds for parallel autonomous systems
Amini, A., Paull, L., Balch, T., Karaman, S., Rus, D. IEEE ICRA. 2018 [paper] [video] Learning discrete probabilistic outputs using end-to-end policy networks to estimate continuous control bounds for shared human-robot autonomy. |
|
9. Spatial uncertainty sampling for end-to-end control
Amini, A., Soleimany, A., Karaman, S., Rus, D. NeurIPS Bayesian Deep Learning Workshop. 2018 [paper] Travel award: 8% and Oral spotlight: 12%
A Bayesian dropout sampling approach over kernels is amenable to end-to-end control learning from pixel inputs. |
2017 |
|

|
8. Analysis of pedestrian behaviors through non-invasive Bluetooth monitoring
Yoshimura, Y., Amini, A., Sobolevsky, S., Blat, J., Ratti, C. Applied geography. 2017 [paper] Large-scale mathematical modeling of agent behaviors using only existing passive sensors (Bluetooth). |
2016 |
|

|
7. Accelerated convolutions for efficient multi-scale time to contact computation in Julia
Amini, A., Horn, B., Edelman, A. arXiv preprint arXiv:1612.08825. 2016 [paper] Accelerating the convolution operation enables drastic improvements on timed collision estimation. Results are integrated into JuliaLang. |
|
6. Analysis of customers’ spatial distribution through transaction datasets
Yoshimura, Y., Amini, A., Sobolevsky, S., Blat, J., Ratti, C. Large-Scale Data-and Knowledge-Centered Systems. 2016 [paper] Mathematical modeling of human mobility using large-scale transaction (purchase) datasets for improve advertisement and urban management. |
2014 |
|
|
5. Uncovering the directional heterogeneity of an aggregated mobile phone network
Pei, T., Sobolevsky, S., Ratti, C., Amini, A., Zhou, C. Transactions in GIS. 2014 [paper] Using large-scale datasets from passively collected mobile phone records, we discover directional imbalances in human mobility. |
|
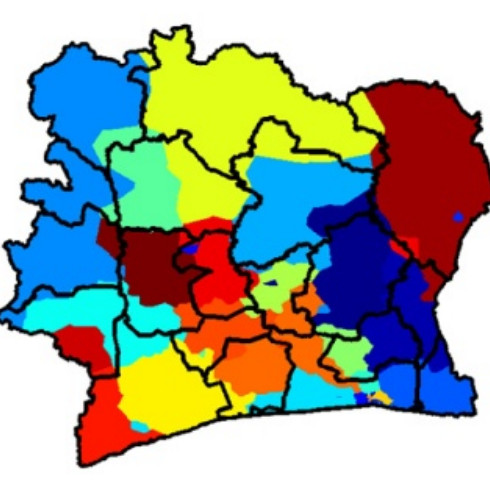
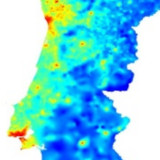
4. The impact of social segregation on human mobility in developing and industrialized regions
Amini, A., Kung, K., Kang, C., Sobolevsky, S., Ratti, C. EPJ Data Science. 2014 [paper] Develop mathematical models for human mobility using mobile phone records in industrialized (Portugal) and developing (Ivory Coast) nations. Emergent communities in the underlying network structure provide clues to improving urban design and efficiency. |
2013 |
|
|
3. The differing tribal and infrastructural influences on mobility in developing and industrialized regions
Amini, A., Kung, K., Kang, C., Sobolevsky, S., Ratti, C. Network Mobility (NetMob). 2013 [paper] Oral spotlight: 16%
Tale of two nations: large-scale mobile phone records are used to estimate community network structure differences across nations. |
|
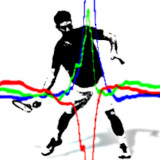
2. System and method for motion analysis and feedback with ongoing dynamic training orientation determination
Amini, A. US Patent 13/183,306. 2013 [patent] From expert demonstrations, machine learning models are built to continuously estimation motions with 97% accuracy and provide corrective feedback to the user. First place grand-prize at EUCYS and BTYSTE 2011. |
|
1. System and method for adaptive delivery of game balls based on player-specific performance data analysis
Amini, A. US Patent 8,419,560. 2013 [patent] From expert demonstrations, machine learning models are built to continuously estimation motions with 97% accuracy and provide corrective feedback to the user. First place grand-prize at EUCYS and BTYSTE 2011. |