
My research has contributed theoretically-grounded solutions for robust and adaptive decision making. I have demonstrated the relevance of these solutions in a number of domains, such as autonomous flight, self-driving vehicles, and manufacturing. These applications are enabled by algorithms that propagate uncertainty cyclically from training, to representations, to action, thereby achieving robust, trustworthy, and interpretable solutions.
Data-driven Synthesis of Learning Environments
This project develops a platform for data-driven simulation of embodied agent perception and closed-loop control learning directly from real-world data. Our research produced the first successful instance of training an end-to-end autonomous driving control policy using reinforcement learning entirely in simulation, and then deploying this policy directly in the real world on new roads and environments.
Fast, Scalable, and Calibrated Uncertainty Estimation
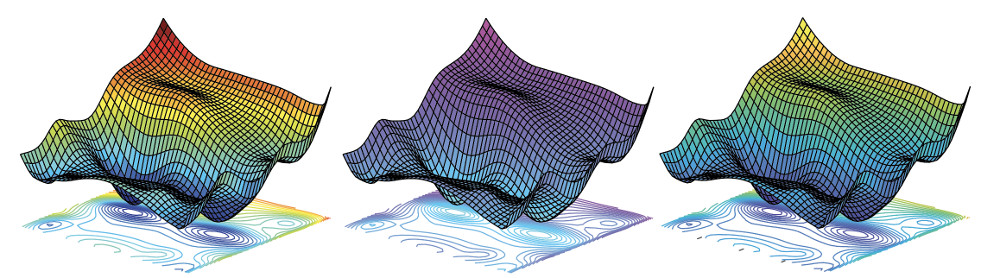
As more of the autonomy stack becomes learning based, it is becoming increasingly important to understand if the predictions of the controller can be trusted. In this project, we develop novel methods for quantifying uncertainty of deep neural networks and leveraging such knowledge to improve improved robustness of robot controllers, experimental drug design, and tactile sensing.
Interpretable and Robust Neural Models
In this project we develop a novel continuous-time neuron model with a dynamically changing (liquid) time-constant to enable improved representation learning. Our models take inspiration from biology and enable 100x smaller and more auditable networks for end-to-end autonomous driving and aerial drone navigation.
End-to-End Learning of Robotic Actuation

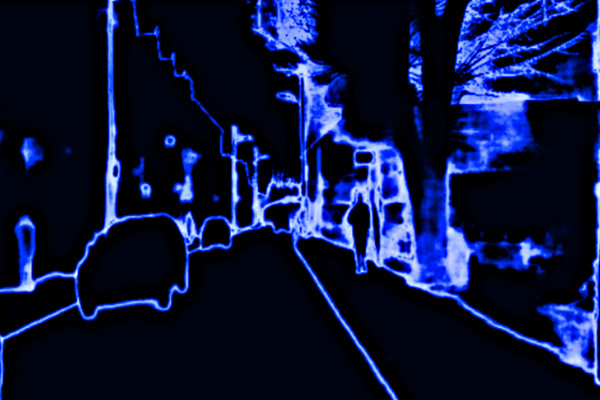
Autonomous systems need the ability to learn from and adapt to their environment. In this project, we are developing algorithms that learn directly from raw sensory data (e.g. from a RGB video camera) to navigate a full-scale autonomous vehicle through complex scenarios.
Uncovering and Mitigating Algorithmic Bias

In this project, we develop a general algorithm for identifying hidden biases and for adaptively re-weighting samples to overcome such harmful dataset biases. Our algorithms have drastically improved state-of-the-art face detectors, self-driving control models, and time-series predictors.
Accelerating Stochastic Gradient Descent for Non-Convex Deep Learning
While there has been progress in accelerating gradient descent algorithms through variance reduction, minimal work has been done to investigate their effectiveness in a deep or any non-convex setting. In this project, we test the existing state of the art on the much more complex deep architectures, and also present a new variant combo optimization algorithms utilizing variance reduction techniques.
Using Mobile Phone Data to Evaluate Segregation in Developing and Urbanized Regions
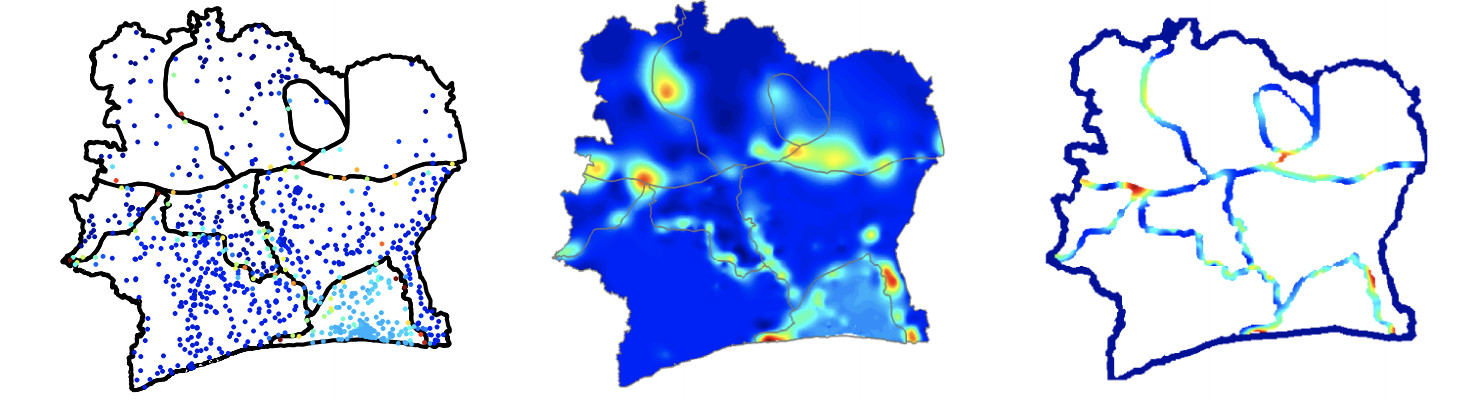
This study leverages mobile phone data to analyze mobility patterns in developing countries, especially in comparison to more developed countries. By comparing mobile phone data collected from the Ivory Coast to similar data collected in Portugal, we are able to highlight differences in mobility patterns—such as differences in likelihood to travel, as well as in the time required to travel—that are relevant to consideration on policy, infrastructure, and economic development.
Uncovering Human Mobility from Pervasive Sensing
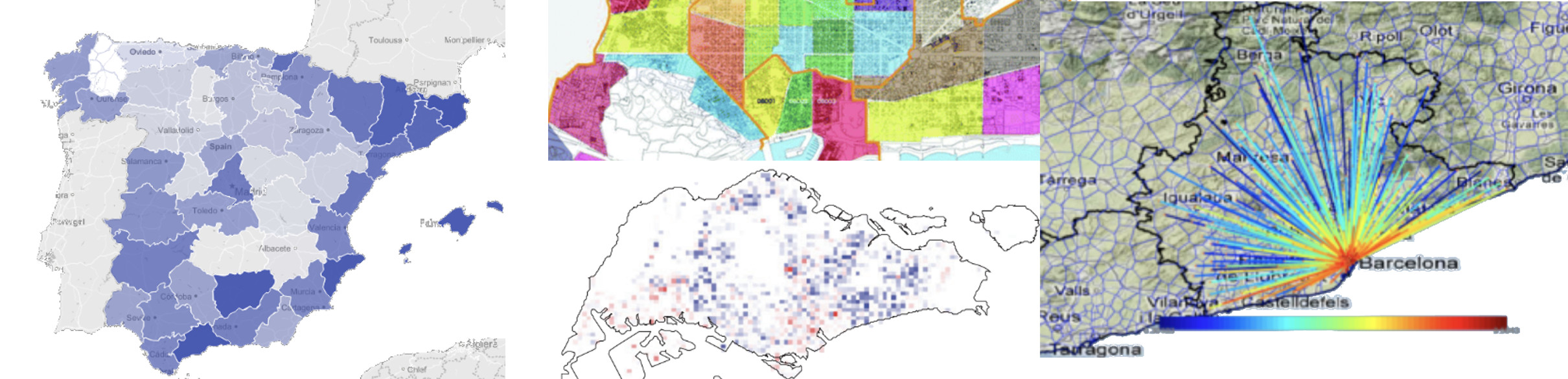
While there has been progress in accelerating gradient descent algorithms through variance reduction, minimal work has been done to investigate their effectiveness in a deep or any non-convex setting. In this project, we test the existing state of the art on the much more complex deep architectures, and also present a new variant combo optimization algorithms utilizing variance reduction techniques.
Tennis Sensor Data Analysis
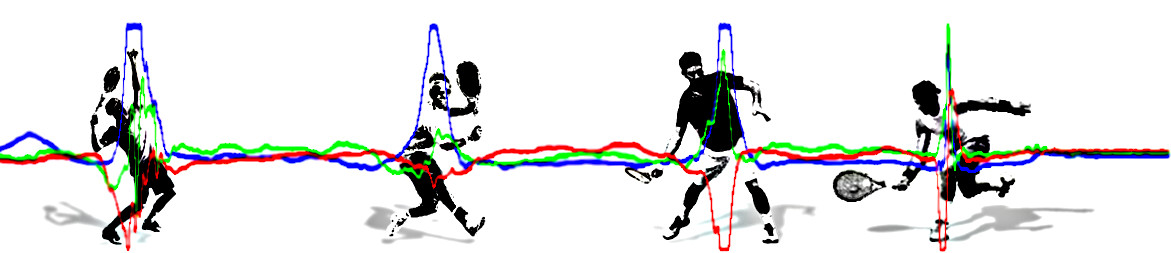
Sensors capable of capturing audio, video, and inertial data (such as accelerometers, gyroscopes, and magnetometers) have become so inexpensive, they are often found in smart phones and even remote control toys. In this project, I collected and analyzed gigabytes of tennis sensor data and created an algorithm for automatically distinguishing between 15 different tennis stroke types using only inertial data, with accuracy averaging over 98%. I created a real-time computer software system to analyze sports performance data as it is generated and provide unbiased and precise motion refinement feedback to the athlete or coach. My findings are relevant to a wide variety of motion assessment scenarios in sports, physical therapy, and emergency response.