RRG algorithm. More...
#include <rrg.h>
Public Member Functions | |
| rrg (sampler_t &sampler_in, distance_evaluator_t &distance_evaluator_in, extender_t &extender_in, collision_checker_t &collision_checker_in, model_checker_t &model_checker_in) | |
| A constructor that initializes all components. | |
| int | iteration () |
| A function call to initiate one iteration of the algorithm. | |
Public Attributes | |
| parameters_t | parameters |
| Algorithm parameters. | |
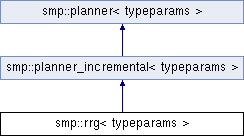
RRG algorithm.
Provides an implementation of the RRG algorithm. Inherits from the generic incremental sampling-based motion planner, overriding the iteration function.
libbot_rrg_double_integrator.cpp, libbot_rrg_dubins_car.cpp, libbot_rrg_dubins_double_integrator_airplane.cpp, libbot_rrg_single_integrator.cpp, libbot_rrg_single_integrator_mu_calculus.cpp, standalone_rrg_double_integrator.cpp, standalone_rrg_dubins_car.cpp, standalone_rrg_dubins_double_integrator_airplane.cpp, standalone_rrg_single_integrator.cpp, and standalone_rrg_single_integrator_mu_calculus.cpp.
| smp::rrg< typeparams >::rrg | ( | sampler_t & | sampler_in, |
| distance_evaluator_t & | distance_evaluator_in, | ||
| extender_t & | extender_in, | ||
| collision_checker_t & | collision_checker_in, | ||
| model_checker_t & | model_checker_in | ||
| ) |
A constructor that initializes all components.
This is the recommended constructor that initializes all components all at once. It calls the corresponding constructor of the base class planner_incremental<typeparams> with the same arguments.
| sampler_in | New sampler component. |
| distance_evaluator_in | New distance evaluator component. |
| extender_in | New extension function component. |
| collision_checker_in | New collision checker component. |
| model_checker_in | New model checker component. |
| int smp::rrg< typeparams >::iteration | ( | ) | [virtual] |
A function call to initiate one iteration of the algorithm.
Runs one iteration of the RRG algorithm which includes the following steps:
Implements smp::planner_incremental< typeparams >.
| parameters_t smp::rrg< typeparams >::parameters |
Algorithm parameters.
This class stores the parameters used by the algorithm. These parameters can be modified by the user using the methods provided by the class planner_parameters.

