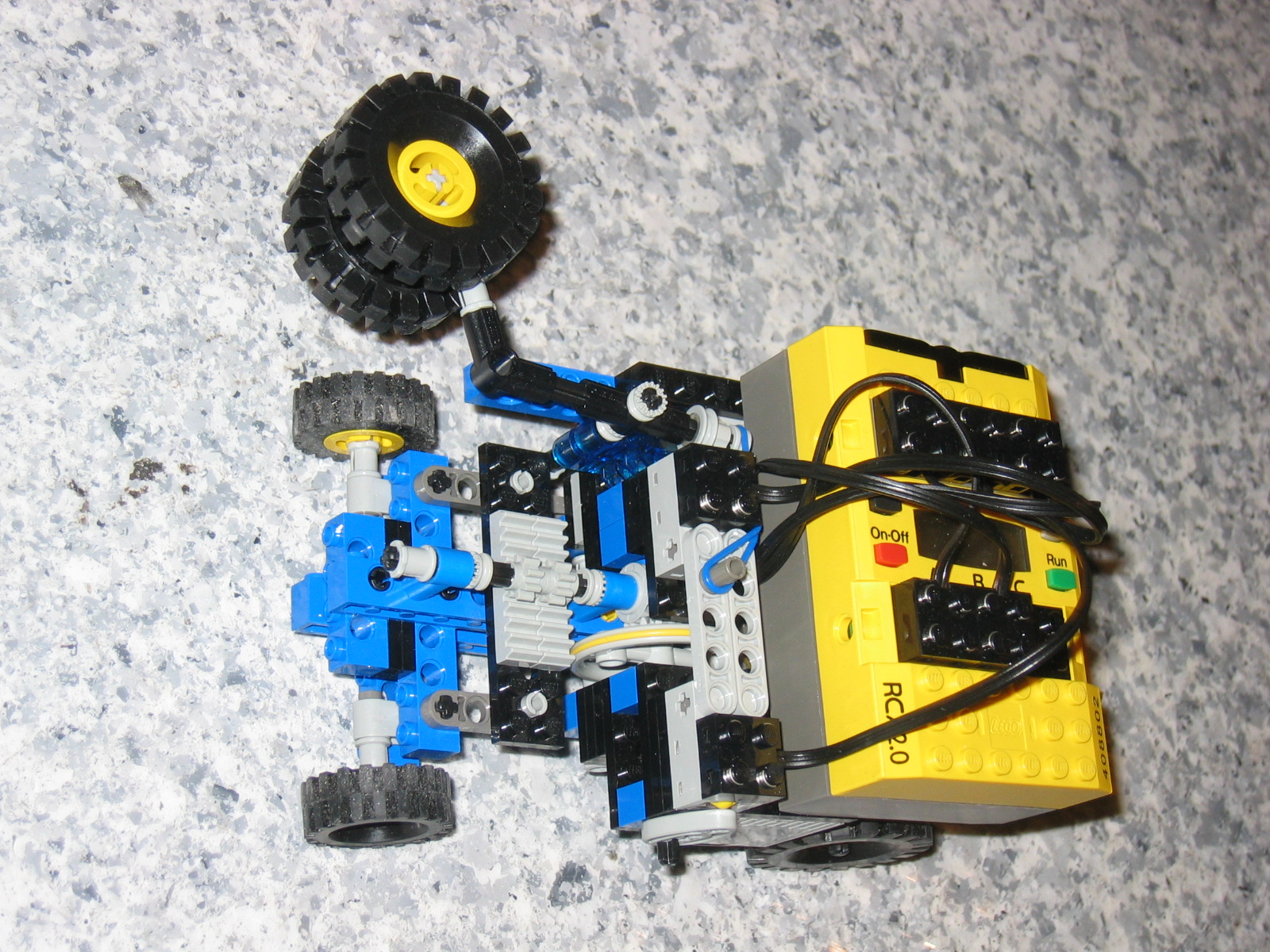
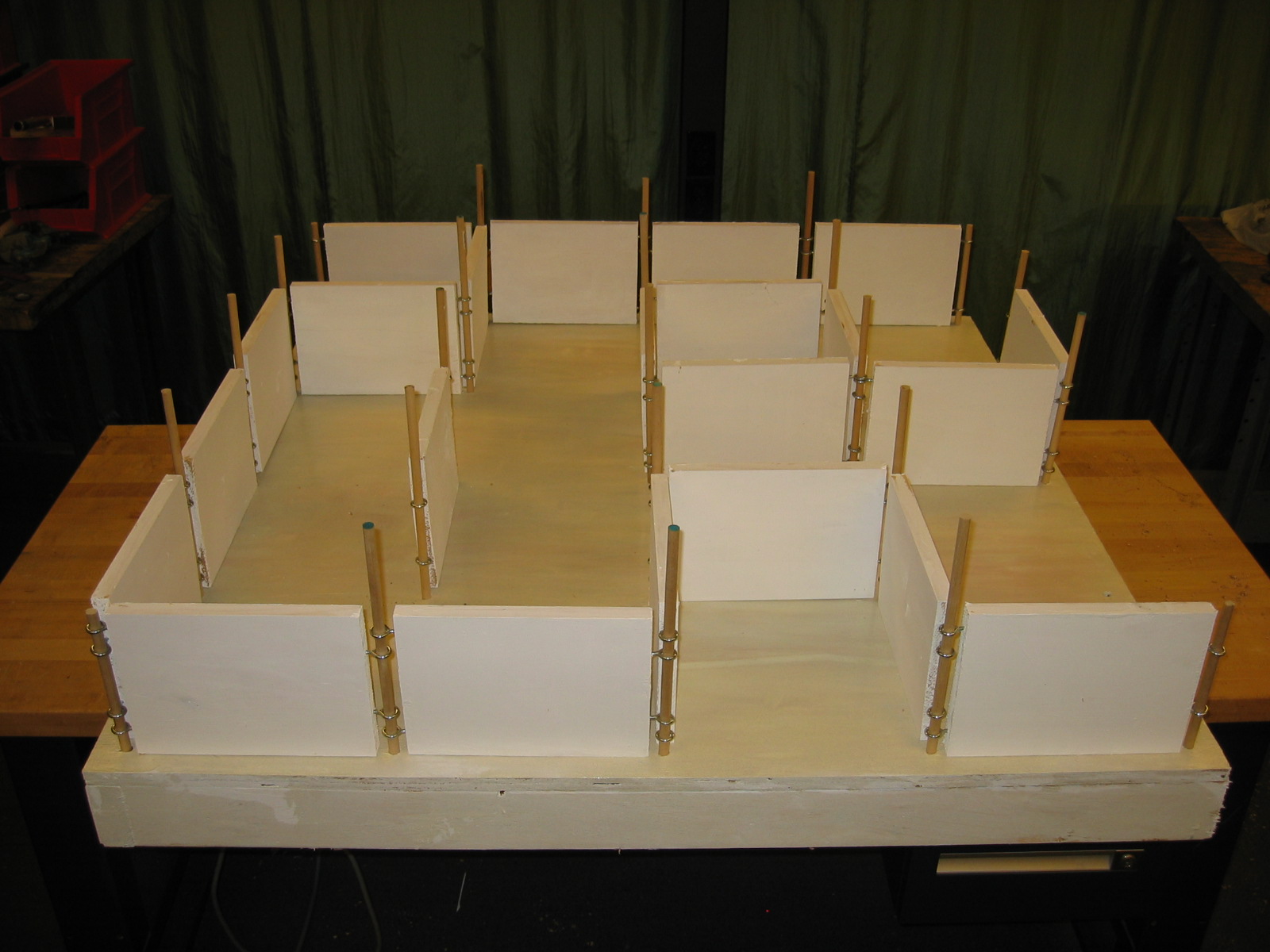
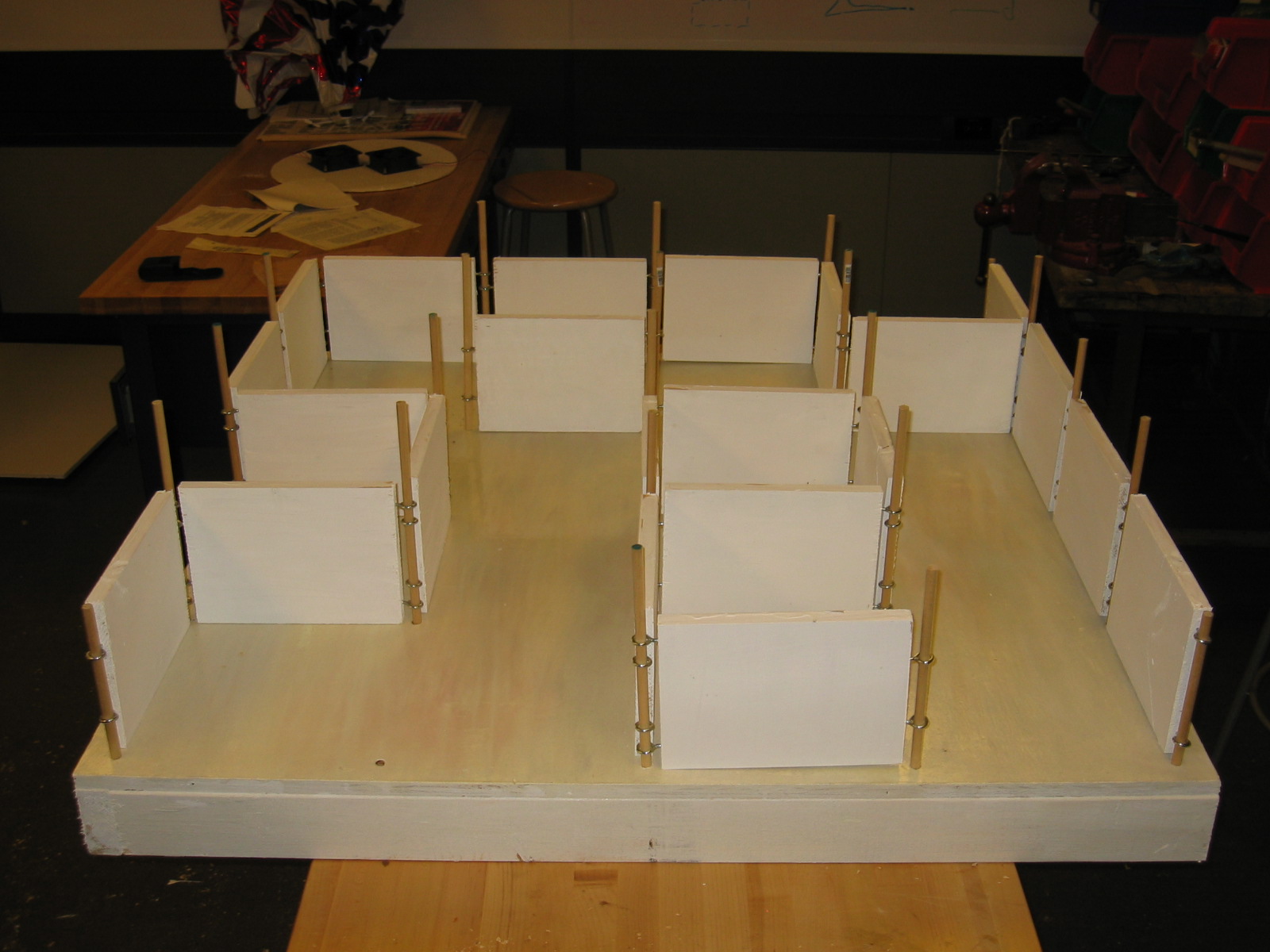
Three rover designs exist. The first rover design has a basic forward bumper and can be used to teach bump-sensor feedback. This rover was used in one problem set that required students to program the rover to drive in a square. Students were then asked to rebuild this basic rover into a 2nd variant, the Maze Rover. This was used in a 3-D Maze navigation problem set. The final lab involved yet another rover, a Maze Rover. The task was to navigate a 5x5 grid of 1 sq. ft. color vinyl tiles (black, grey, dark grey, and white). A light sensor recorded the colors of the tiles to the Lego RCX “Datalog” (an embedded stream structure) for post mission transmission to a computer running BRICX and analysis.
The assignments proved too challenging. Lack of staff support and knowledge of bugs made troubleshooting difficult. The 3-D Maze solving assignment and the final lab can easily be extended to complete 1 term modules similar to Fall 2005.
Instructions: <Ada Mindstorms Installation.pdf>
Files: <ZERO - Lego Tower Drivers.exe>
<SECOND - adagide-install.exe>
<FIFTH - bricxcc_setup_3377.exe>
Basic Rover: <Basic Robot Instructions.pdf>
<Basic Robot Wiring Diagram.pdf>
Maze Rover: <Maze Robot Instructions.pdf>
Mineral Survey Rover: <Mars Robot Instructions.pdf>
Trial Code: #<basic_mindstorms_demo.adb>#
Lecture 1: <Lecture 1 - Ada Mindstorms.pdf>
Assignment: <MineralSurveyorProblem.pdf>
#MODELS.zip# - 3D LDraw Files of the three rovers and JPEG of Assembly & 3D (Please visit the main resources page to download the LDRAW install package needed to use this file).
{kind=link}
{kind=link}
{kind=link}