I have accomplished research projects in the areas of multi-agent systems, machine learning, control, and autonomous driving. Many of them have been implemented and evaluated on real robotic systems.
Collective Transport of an Unknown Object by a Team of Robots with Limited Sensing
My PhD thesis focused on end-to-end fully distributed approach to retrieve a large object from an unknown environment for example rescuing earthquake victims. The object is assumed to be in an environment without GPS or Internet infrastructure. The object is also assumed to be too heavy to transport by one robot. In this project a team of robots explore the unknown environment and find the object. We have designed an intelligent and efficient gripper hardware for the robots to reliably attach to the object and navigate it safely in an unknown environment. To plan and navigate the object safely, the agents require the knowledge about the object dimension and center of geometry. During this project, I designed a distributed object centroid estimation and also a distributed object dimension estimation algorithm. A distributed path planning algorithm based on a variant of the distributed Bellman-Ford algorithm is then used to construct a shortest-path tree. A path navigation algorithm is presented to map each path segments to a distributed motion controller that can command the robots to transport the object. Four distributed motion controllers are designed to navigate the object through the environment while avoiding obstacles. Finally, a distributed recovery algorithm is presented to recover the robots efficiently and safely after collective transport.
Related publication:
- G. Habibi, Z. Kingston, W. Xie, M Jellins, J. McLurkin,“Distributed Centroid Estimation and Motion Controllers for Collective Transport by Multi-Robot Systems“, ICRA2015 PDF
- G. Habibi, Z. Kingston, Z. Wang, M. Schwager, J. McLurkin,“Pipelined Consensus for Global State Estimation in Multi-Agent Systems“, AAMAS 2015 PDF
- G Habibi, W Xie, M Jellins, J McLurkin,“Distributed Path Planning for Collective Transport Using Homogeneous Multi-robot Systems", DARS 2014, PDF
- G Habibi, SP Fekete, Z Kingston, J McLurkin, "Distributed Object Characterization with Local Sensing by a Multi-robot System", DARS 2016 PDF
- G. Habibi, Z. Kingston, W. Xie, M Jellins, J. McLurkin,“Distributed Centroid Estimation and Motion Controllers for Collective Transport by Multi-Robot Systems“, ICRA2015 PDF
- G. Habibi, Z. Kingston, Z. Wang, M. Schwager, J. McLurkin,“Pipelined Consensus for Global State Estimation in Multi-Agent Systems“, AAMAS 2015 PDF
- G Habibi, W Xie, M Jellins, J McLurkin,“Distributed Path Planning for Collective Transport Using Homogeneous Multi-robot Systems", DARS 2014, PDF
- G Habibi, SP Fekete, Z Kingston, J McLurkin, "Distributed Object Characterization with Local Sensing by a Multi-robot System", DARS 2016 PDF
Context-Aware Pedestrian Intent Recognition
Pedestrian intention recognition is crucial to the safe and efficient working of autonomous vehicles in busy, urban scenarios. However, it is a much more challenging problem, as opposed to intention recognition of cars or cyclists, because of the absence of pedestrian rules of the road like lane driving or staying within road boundaries etc. The problem complexity is increased further in urban intersections with traffic lights and tightly packed sidewalks. The objective of this project is to accurately predict pedestrian motion while embedding the environmental context into account. The embedding of semantics would further aid in applying learnt prediction models to prediction in new intersections as well, that the model was not trained on.

Related publication:
- G. Habibi, N. Jaipuria, J.P. How, "Context-Aware Pedestrian Motion Prediction In Urban Intersections", arXiv:1806.09453, PDF
Transferable Motion Prediction
We have presented a transferable model for accurate pedestrian trajectory prediction in intersection corners or near crosswalks. Given prior knowledge of curbside geometry (i.e. angle made by intersecting curbs at the corner point of interest and the coordinates of the corner itself), the presented framework can accurately predict pedestrian trajectories even in new, unseen intersections. This is achieved by learning motion primitives in a common frame, called the curbside coordinate frame. A key insight in developing this common frame is to ensure that trajectories from intersections with different geometries, representing the same behavior, are spatially similar in the common frame. Motion primitives learned in such a common frame, can then be easily generalized to predict in new intersections, with different geometries than the ones trained on.
Related publication:
- N.Jaipuria, G.Habibi, J.P. How,"Learning in the Curbside Coordinate Frame for a Transferable Pedestrian Trajectory Prediction Model",ITSC 2018. PDF
Incremental Learning of Motion of Road Users
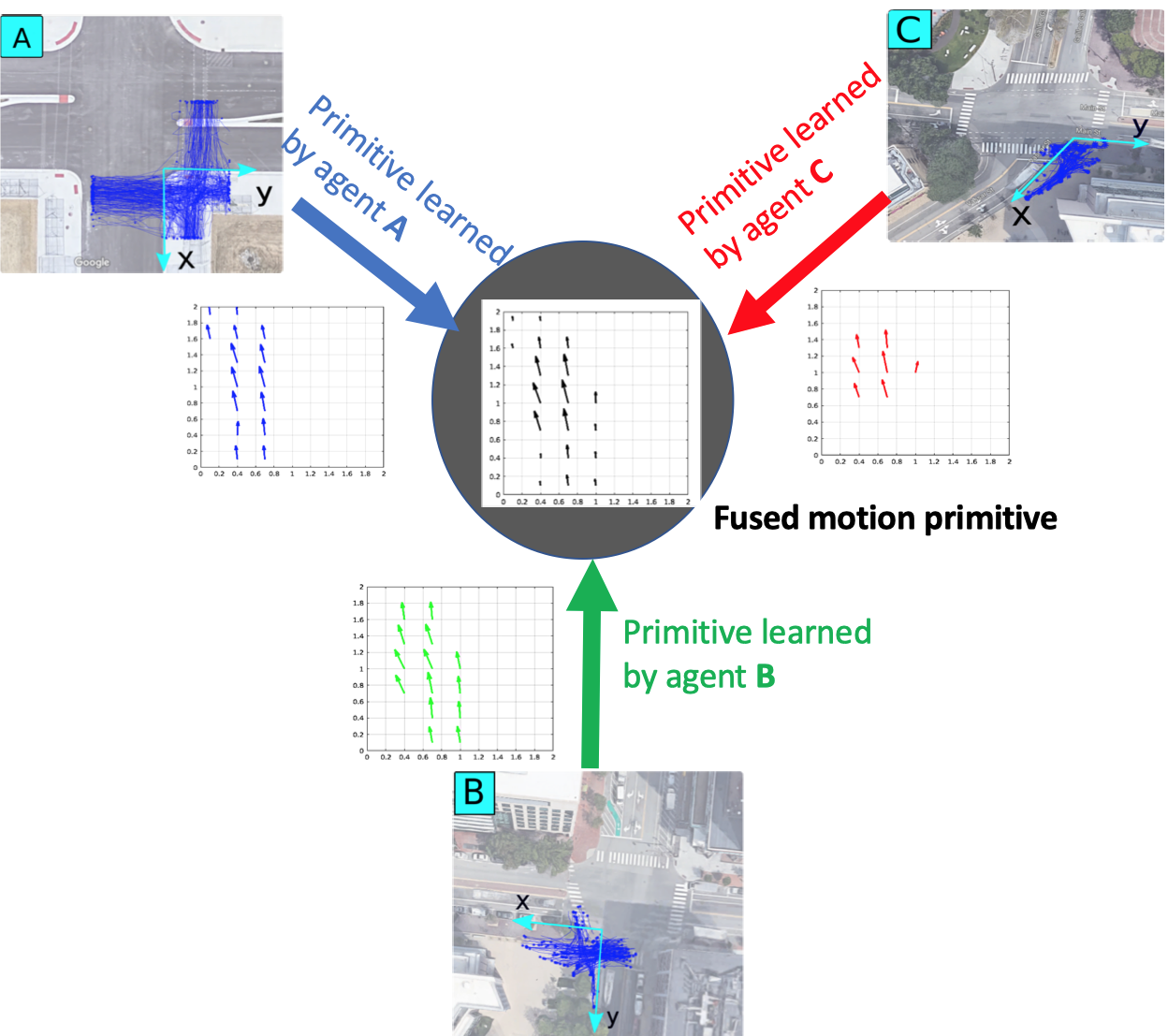
We have designed a novel incremental learning algorithm for pedestrian motion prediction, with the ability to improve the learned model over time when data is incrementally available by one or multiple agents. In this setup, trajectories are modeled as simple segments called motion primitives. Transitions between motion primitives are modeled as Gaussian Processes. When new data is available, the motion primitives learned from the new data are compared with the previous ones by measuring the inner product of the motion primitive vectors. Similar motion primitives and transitions are fused and novel motion primitives are added to capture newly observed behaviors. The proposed approach is tested and compared with other baselines in intersection scenarios where the data is incrementally available either from a single intersection or from multiple intersections with different geometries. In both cases, our method incrementally learns motion patterns and outperforms the offline learning approach in terms of prediction errors. The results also show that the model size in our algorithm grows at a much lower rate than standard incremental learning, where newly learned motion primitives and transitions are simply accumulated over time, without any combination fusion.
Related publication:
- G. Habibi, N. Jaipuria, J.P. How, "Incremental Learning of Motion Primitives for Pedestrian Trajectory Prediction at Intersections"arXiv:1911.09476 PDF
- G. Habibi, N. Jaipuria, J.P. How, "Incremental Learning of Motion Primitives for Pedestrian Trajectory Prediction at Intersections"arXiv:1911.09476 PDF
Multi-Robot Recovery
We have designed and implemented a self-stabilizing distributed algorithm to recover a large number of robots safely and efficiently in a goal location. Previously, we designed a distributed algorithm, called DMLST, to recover robots. Our approach constructed a maximum-leaf spanning tree for physical routing, such that interior robots remained stationary and leaf robots move. In this paper, we extend our approach to k-DMLST recovery that provides k-connectivity in the network, meaning that each robot is connected to the goal location through k trees. This redundancy provides stronger network connectivity by reducing the probability of losing the parent during recovery. We also propose an efficient navigation algorithm for the motion of robots which guarantees forward progress during the recovery. k-DMLST recovery has been tested and compared with other methods in simulation, and implemented on a physical multi-robot system. A basic recovery algorithm fails in all experiments, and DMLST recovery is not successful in few trials. However, k-DMLST recovery efficiently recovers more than 90 % of robots in all trials.
Related publication:
- G Habibi, L Schmidt, M Jellins, J McLurkin,"K-redundant trees for safe and efficient multi-robot recovery in complex environment", ISRR 2014 PDF
- G Habibi, L Schmidt, M Jellins, J McLurkin,"K-redundant trees for safe and efficient multi-robot recovery in complex environment", ISRR 2014 PDF