Vibration Isolation Platform
A 6-axis tabletop, adaptable vibration isolator for UHV experiments
Research Assistant - Advisor: Dr. Fabrice Matichard - Aug. 2015 - Dec. 2018
This vibration isolation system is a tabletop 6-axis 40 dB/decade passive isolation system, starting from ~1 Hz, with active damping. Although it was originally designed to house the core components of the advanced LIGO in-vacuum optical parametric oscillator, the platform is designed to be easily adaptable and could be used in other metrology or optical experiments. The first two units of this isolation system are currently installed at the aLIGO facilities.
The vacuum OPO suspension
As a research assistant at the LIGO Laboratory I have been in charge of the design, testing, and implementation of this isolation platform, under the supervision of Dr. Fabrice Matichard. This platform was designed to host the core optics of Advance LIGO's optical parametric oscillator (OPO), and two units were succesfully installed before LIGO's third run (O3) in 2019. However, my goal was to design a system that could be easily adapted to other applications with minimal re-engineering, which is the reason why this suspension is radically different from previous aLIGO suspensions. The idea was to create a compact single-stage version of the large active vibration isolation systems that LIGO uses to isolate the core interferometer optics, known as the Internal Seismic Isolators (ISI).
CAD Model of the isolation platform
ArchitectureArchitecture
Active Damping control of the resonances
Active DampingActive Damping
Performance of the isolation platform
PerformancePerformance
Architecture
The optical table (stage 1) is isolated bysuspended with three independent blade assemblies bolted to stage 0. This approach, based on low-height posts, reduces the cost, weight, and dimensions compared to the welded support frames used in previous LIGO suspensions. It maximizes the optical table dimensions with respect of the space available and makes the system adaptable to different optical table shapes. The number, position, and characteristics of the blade assemblies can easily be adapted to various table shapes, payloads, and performance requirements.
Active Damping
The rigid body modes of the suspension must be damped to avoid excess motion at the resonance frequencies. This can be done effectively using active voice-coil actuator.
The LIGO Scientific Collaboration (LSC) has produced two types of low-noise ultra-high vacuum compatible collocated actuator-sensor pairs, named AOSEM and BOSEM. Their actuation strengths (for a 2x6 mm SmCo magnet) are 0.0309 N A−1 and 1.694 N A−1, respectively. For the test results presented in the following sections, the platforms were equipped with AOSEMs. In future applications, they can be equipped with BOSEMs to provide additional steering range.
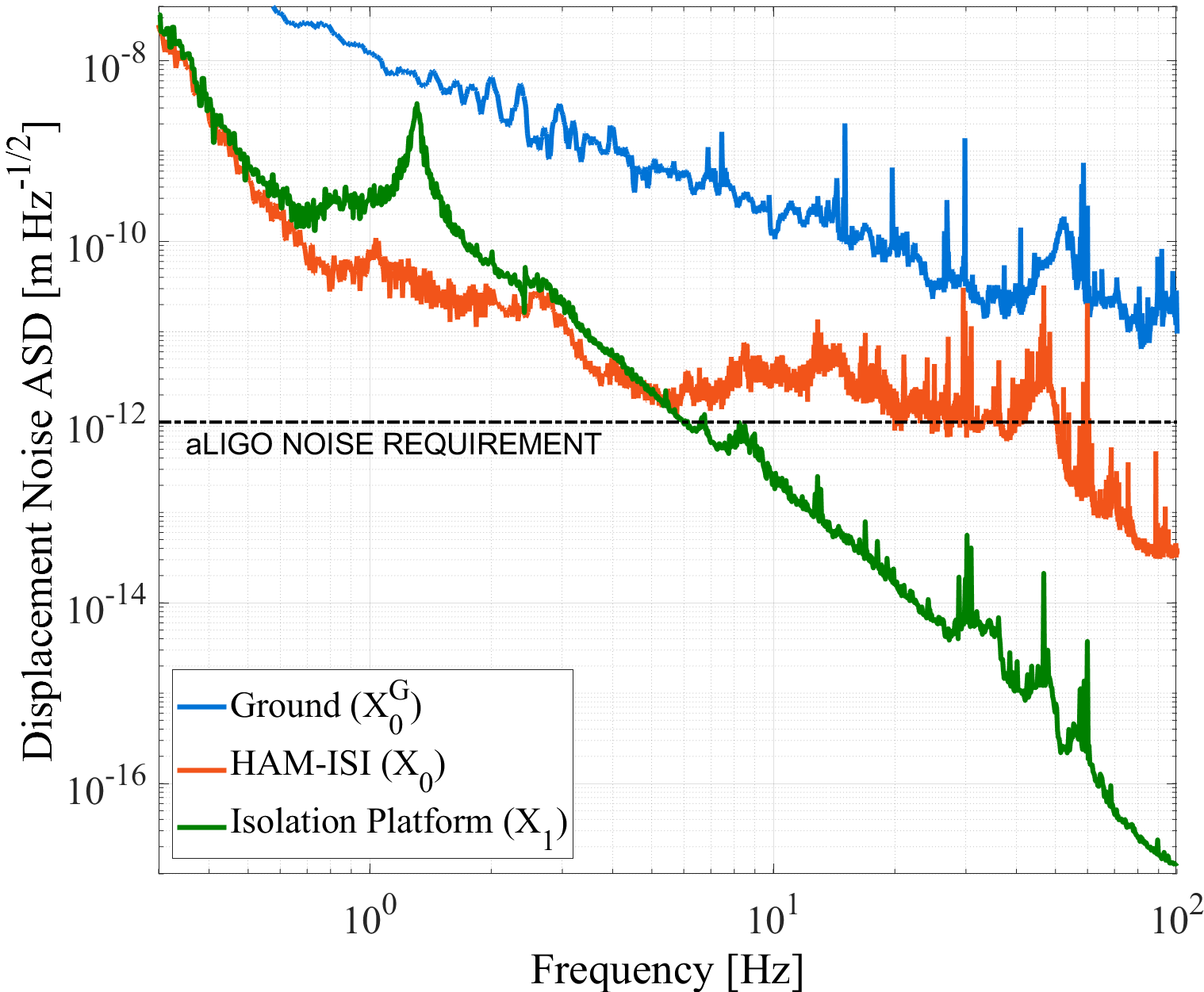
Performance
A prototype of the system was tested at the MIT-LIGO facilities and two units have been installed at the LIGO observatories in Livingston, LA (LLO) and Hanford, WA (LHO). The results presented in this section are from testing these three units. All units exhibited excellent performance.
The Team

This project would not have been possible without the leadership of Dr. Fabrice Matichard, from which I had the chance to learn everything I know about vibration isolators and damping control. However, the isolation platform was part of a larger project, the aLIGO squeezer project. The members of the LIGO squeezer team have been critical in the development, testing, and deployement of this isolation platform.