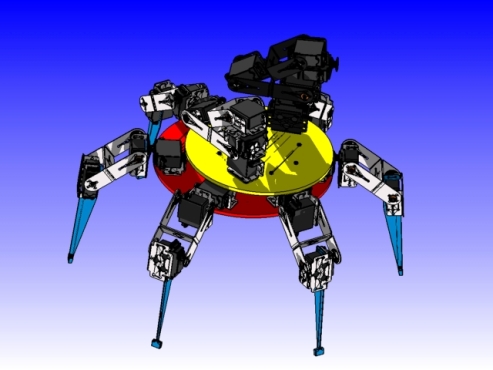
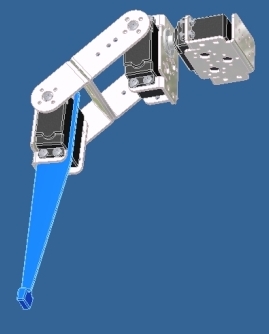
"SunShine" is an untethered, complaint-legged hexapod robot, which designed and modeled by me in my spare time. "Sunshine" has six independent legs, and each one contains three servomotors which contributes to high flexibility of eachleg. Meanwhile "SunShine", located at its top, has a five-degree-of-freedom robotic arm that allows it to finish some simple tasks, like picking a cup. And, next to the arm, there is a three-degree-of-freedom camera which gives "SunShine" an almost 360° view.
Also the completion of the Hexapod Robot "SunShine" gave me the inspiration to design and bulid a new bionic "Jellyfish"robot (currently sponsored by National Undergraduate Scientific and Technology Project).
Idea Originated From:
One day I saw a video from YouTube, which was about some awesome robots from "Japan Robot Exhibition". I was so fascinated by those futuristic robots and at that time an idea came to me that I wanted to build a kind of robot that would overcome all kinds of terrains and, most importantly, would move like a living creature using feet instead of by rotating wheels conventionally, since, I believe, if the wheels are the best answer to the most efficient and effective movement, then nature will certainly evolve into that way, but it seems that is not the occasion.
Modeling Process:
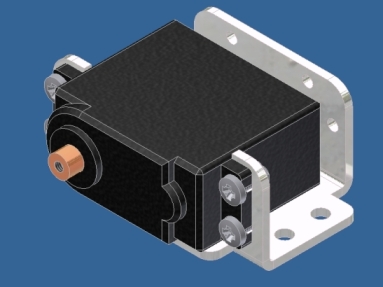
From the very beginning, it was just several servos, I put them with the proper frames in order to later fix them in the corresponding area.
|
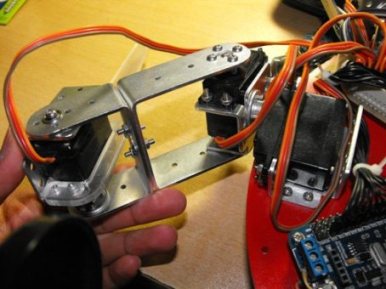
With three servos and the corresponding frames, I put them together and got a 3 degree-of-freedom flexible leg. And later with other five same legs, we can get "SunShine" ready for walking. |
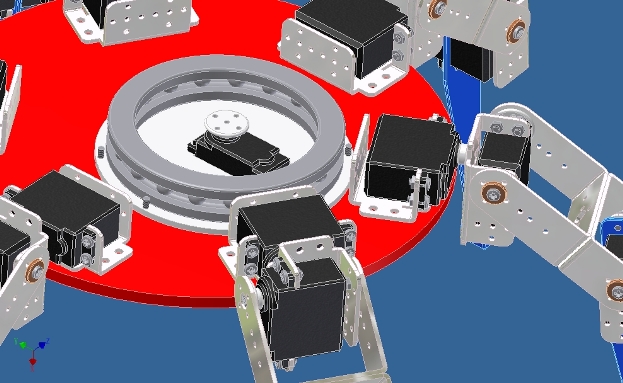 |
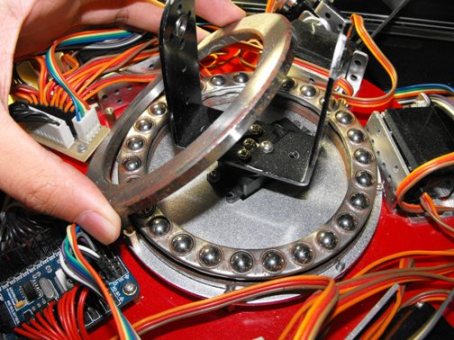
Another very important part of the design and construction of the robot "SunShine" was its strong waist. In order to get a rotatable waist, I used another servo to serve the function, and apparently, only a servo could barely hold the load from all the upper structures, such as upper platform, 6 DOF robot arm, 4 DOF camera and possible load from the objective that the arm carried. So I designed and used a thrust bearing to ensure the load-bearing capacity and at same time guarantee the rotation of the waist of "SunShine". |
|
Knowledge Related:
-
Windows Software Development;
- Circuit Design;
- Inventor 3-D Design;
- Embedded Development;
- Robotics;
- Wireless Communication
 Me and "ShunShine" in My Base Me and "ShunShine" in My Base
|
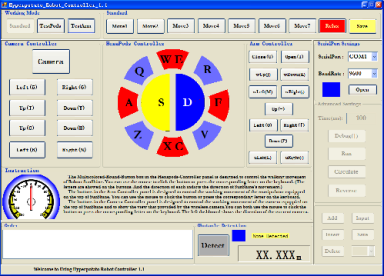
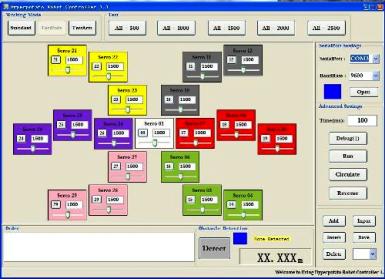
"SunShine" Control UI
|
"SunShine" Leg Test UI
|
|
|