Qianjue Robotics Technology
June 2025 - July 2025

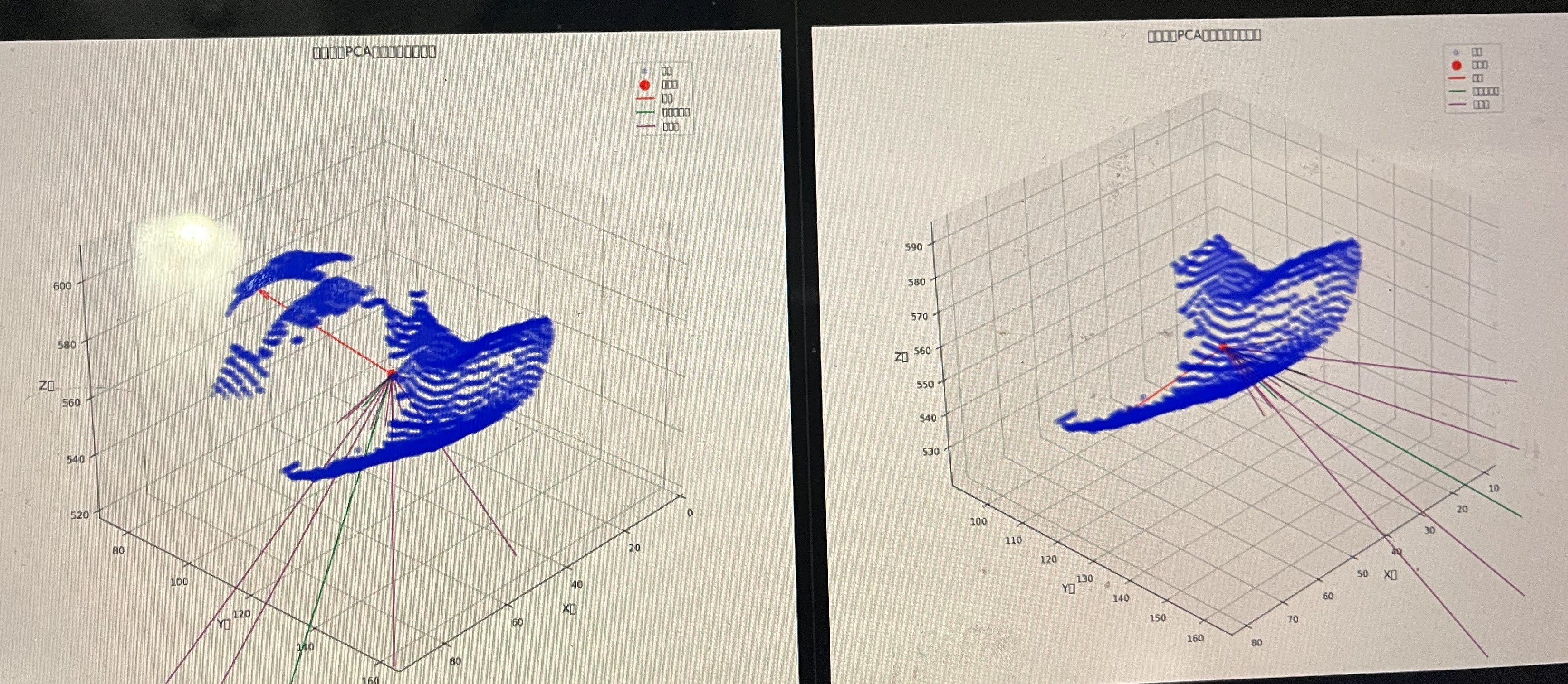
Summary: Improved autonomous grasping pipeline for concave household objects using a RealMan robotic arm and RGB-D point clouds, addressing challenges from sparse contact points, occlusion, and noisy perception. Implemented PCA and K-means clustering for pose estimation to infer object axes and generate grasp poses, enabling reliable grasps for cups placed both upright and on their side. Redesigned perception pipeline with a world-frame coordinate transformation, eliminating redundant computation during robot base motion and significantly improving robustness and efficiency in real-world trials.
Programming language: Python