MIT CSAIL Algorithmic Design Group: Computational Design and Fabrication of Shape-Shifting Robots
October 2025 - December 2025
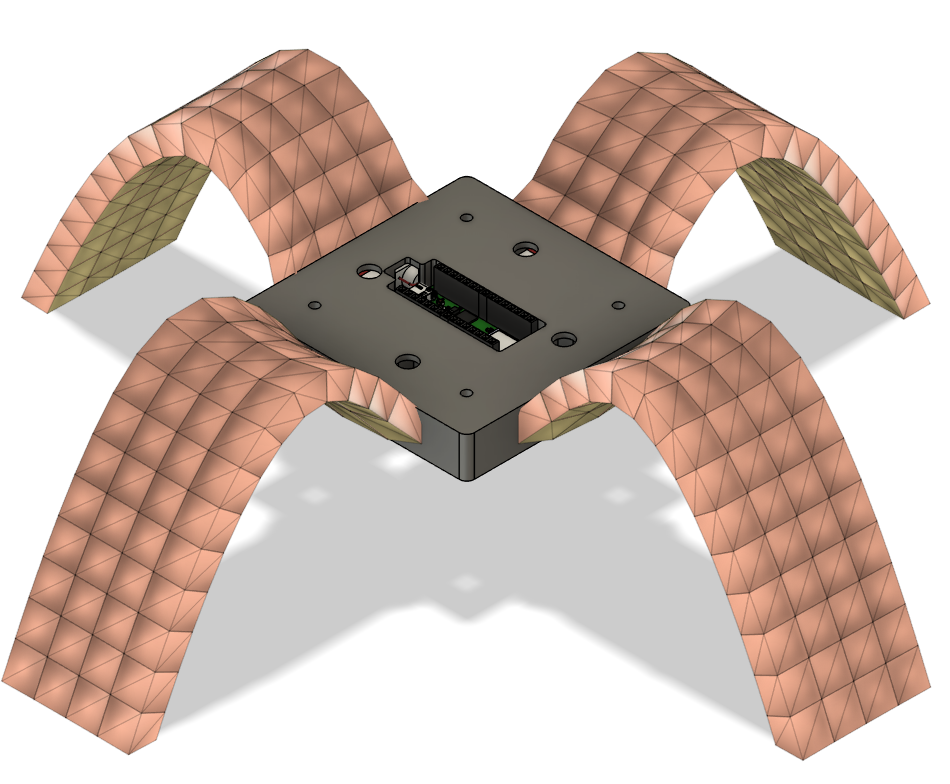
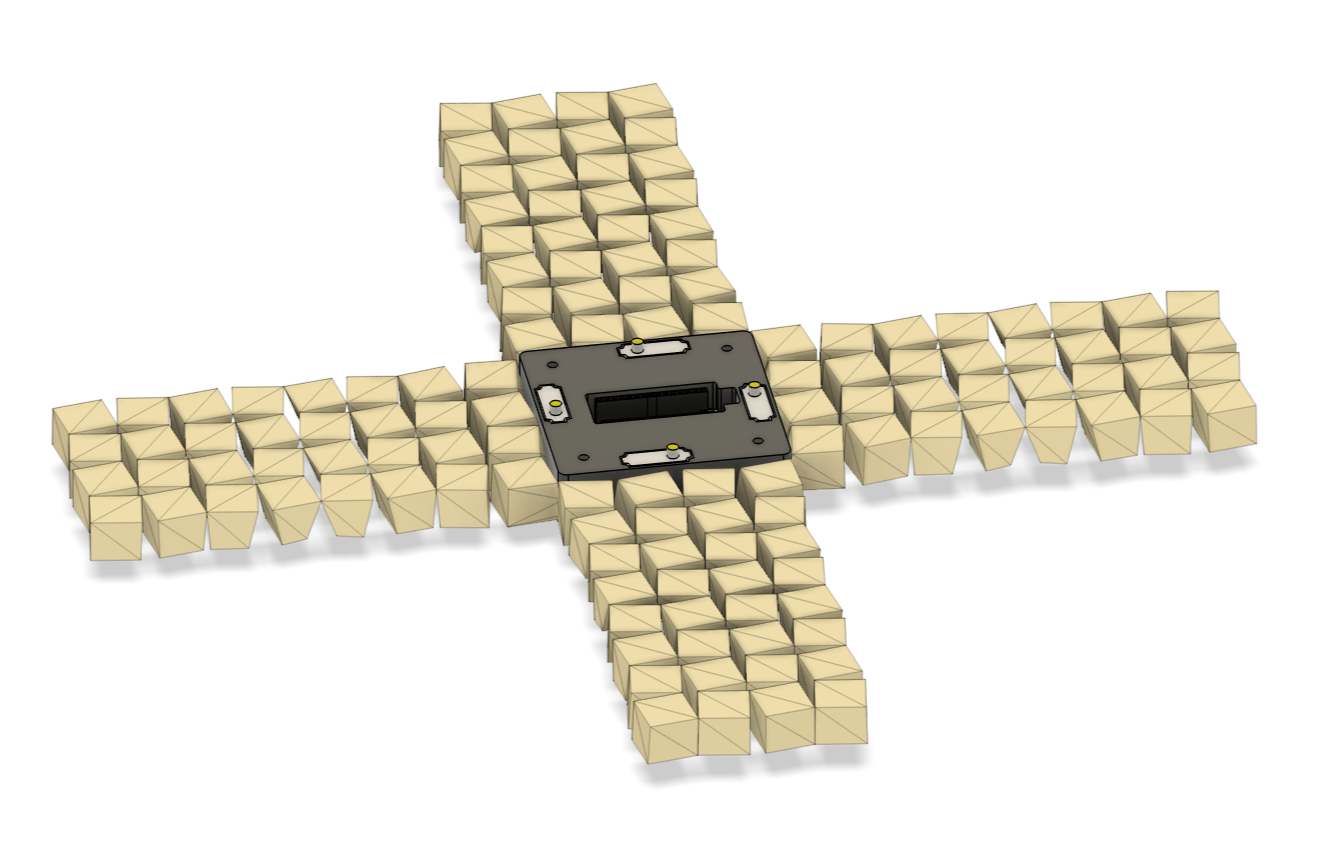
Summary: Developed, prototyped, and fabricated a multimaterial shape-shifting robot capable of controlled transitions using a 3D flattening and string-optimization algorithm. Designed surface meshes for multiple robot morphologies using Fusion 360. Bench-tested servo actuation and integrated electronics to characterize torque limits and mechanical reliability.
Skills
- Design/CAD: Fusion 360
- Electronics: ESP32, servos
- Fabrication: multi-material 3d printing (PLA, TPU)