Friction Design
Friction plays a key role in manipulating objects. Most of what we do with our hands, and the most of what robots do with their grippers, is based on the ability to control frictional forces. Inspired by the anisotropic friction observed on textured plywood surfaces, we seek to design anisotropic friction map on a surface with micro-textures. A fabrication process is designed and friction data are collected on various micro-textures. Special friction property at endeffecor could enable interesting possiblity of manipulation.
Friction Variability in Planar Pushing Data: Anisotropic Friction and Data-Collection Bias
This work aims to better understand the variability and predictability of planar friction. In particular, we focus on the analysis of a recent dataset on planar pushing devised to create a datadriven footprint of planar friction.
We show how we can explain a significant fraction of the observed unconventional phenomena, e.g., stochasticity and multimodality, by combining the effects of material nonhomogeneity, anisotropy of friction and biases due to data collection dynamics, hinting that the variability is explainable but inevitable in practice. We introduce an anisotropic friction model and conduct simulation experiments comparing with more standard isotropic friction models. The anisotropic friction between the object and supporting surface results in convergence of initial condition during the automated data collection.
Numerical results confirm that the anisotropic friction model explains the bias in the dataset and the apparent stochasticity in the outcome of a push. The fact that the data collection process itself can originate biases in the collected datasets, resulting in deterioration of trained models, calls attention to the data collection dynamics.
Related publications:
D. Ma and A. Rodriguez. "Friction Variability in Planar Pushing Data: Anisotropic Friction and Data-Collection Bias." IROS, 2018. Published also on the journal IEEE Robotics and Automation Letters (RA-L), 2018. Full paper
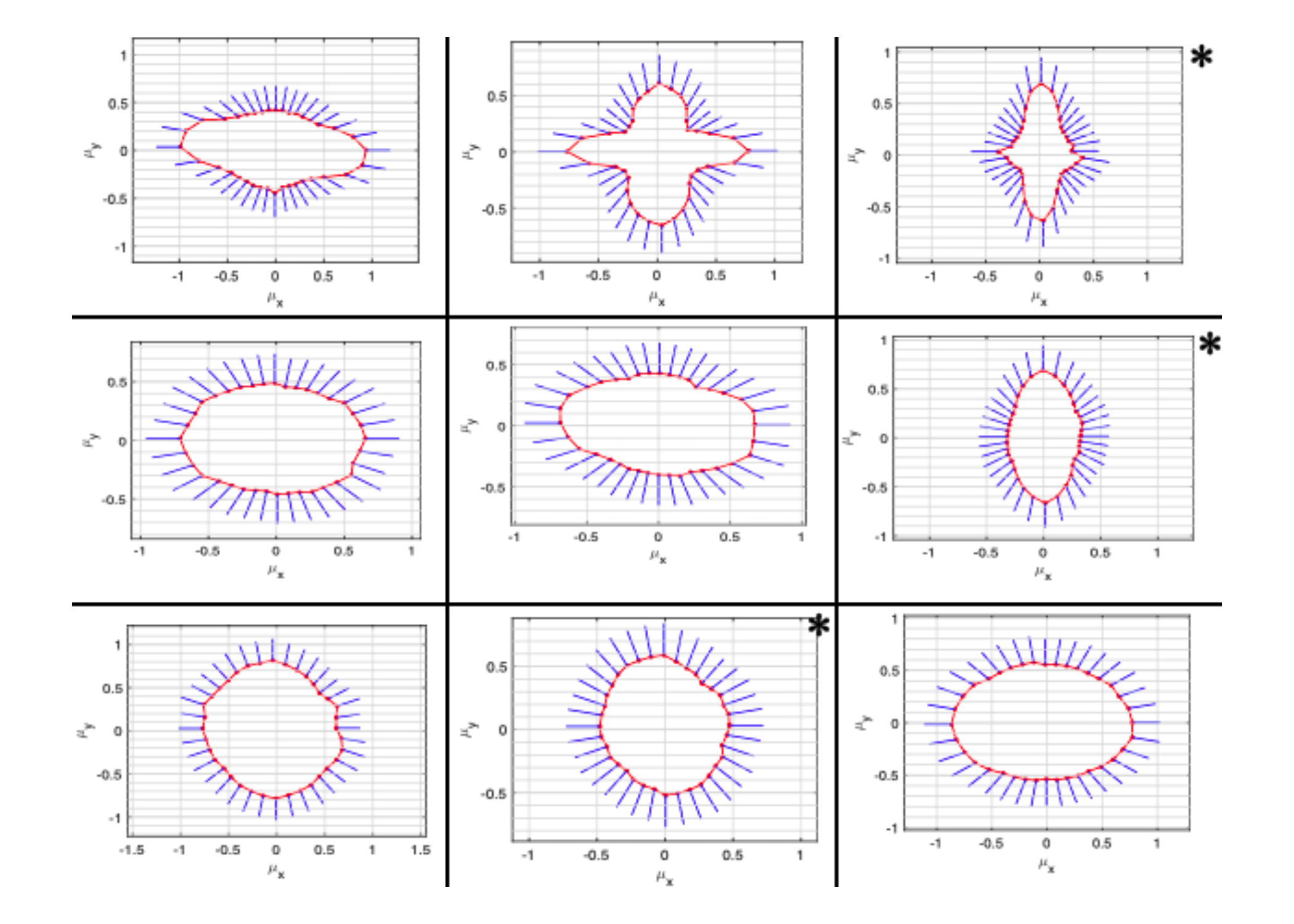
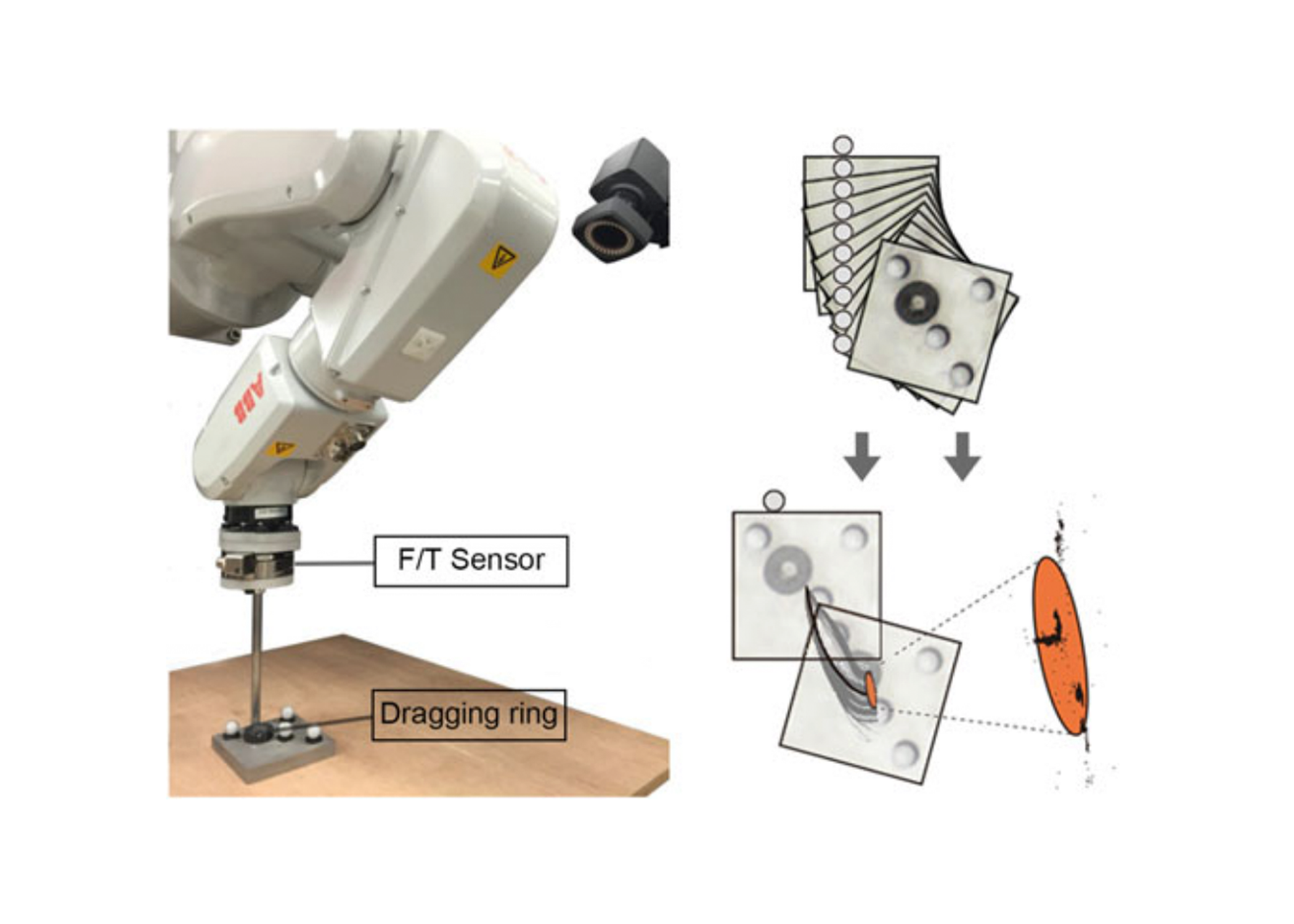
Designing Friction with Micro-Textures (On-going)
Fine control of friction property on a surface isdesirable for robotic manipulation and locomotion. A methodof engineering anisotropic friction map via designing micro-textures is proposed in this paper. Frictional force was col-lected across a spectrum of anisotropic micro-textures and theexperimental data was analyzed in accordance to friction lawssuch as limit curve and maximum-inequality principle (MPI).Qualitative observation and residual sum of squares (RSS)was used to detect lack of normality and non-convexity withineach limit curve. This lack of both normality and convexitycontradicts MPI and suggests that an alternative model is neces-sary. The anisotropic frictional behaviors observed advances thefeasibility of designing micro-textures capable of controllableanisotropic friction map. Examples of interesting friction mapare presented in simulation.