
EDUCATION (Download Resume)
- Postdoc in Robotics at ETH Zurich (RSL, Jan’23-present)
- Postdoc in Robotics at MIT (ACL, Sept’22-Jan’23)
- PhD in Robotics at MIT (ACL, 2019-2022)
- Internship at NASA JPL (Group 347T, Summer 2019)
- MS in Robotics at MIT (ACL, 2017-2019)
- MS in Robotics and Electronics at ETSII-UPM (2016-2018)
- BS in Robotics and Electronics at ETSII-UPM (2012-2016)
Tutorial
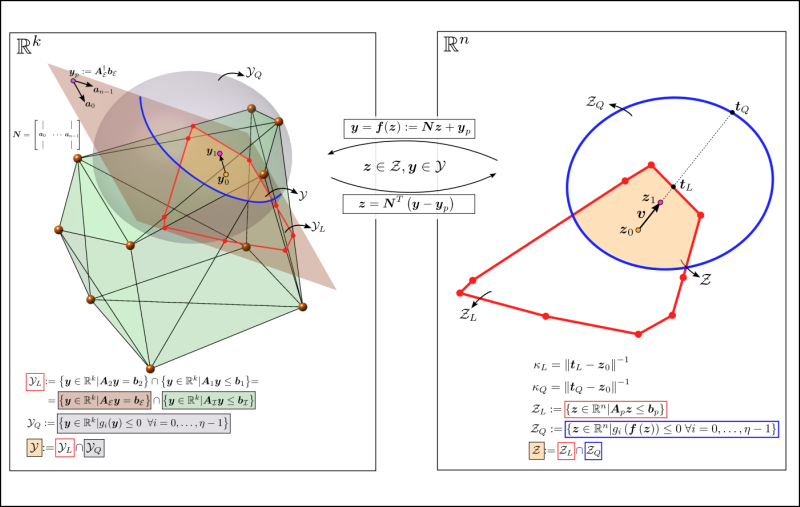
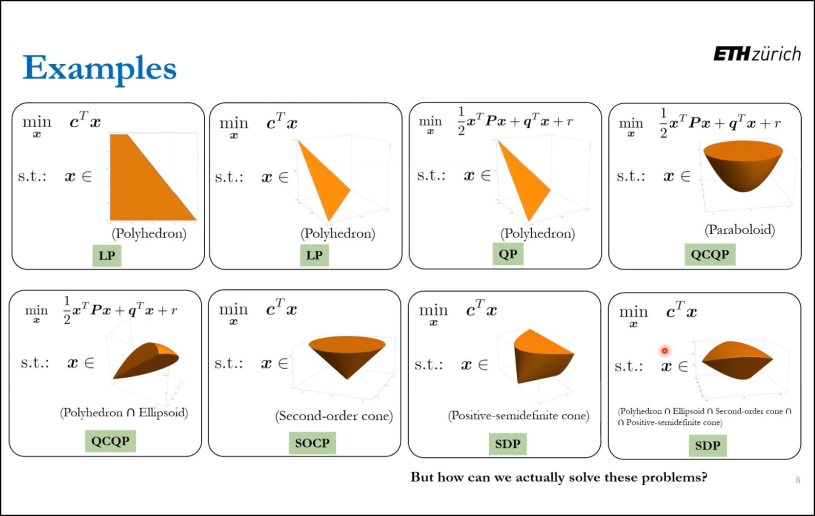
Optimization, Optimal Control, Trajectory Optimization, and Splines
Video

RMADER Planner
Decentralized and Asynchronous Multiagent Trajectory Planner Robust to Comm. Delay
Best Poster Award in CAMRS Workshop (ICRA)
RA-L Paper ICRA Paper Video Code RA-L (in review) and ICRA 2023
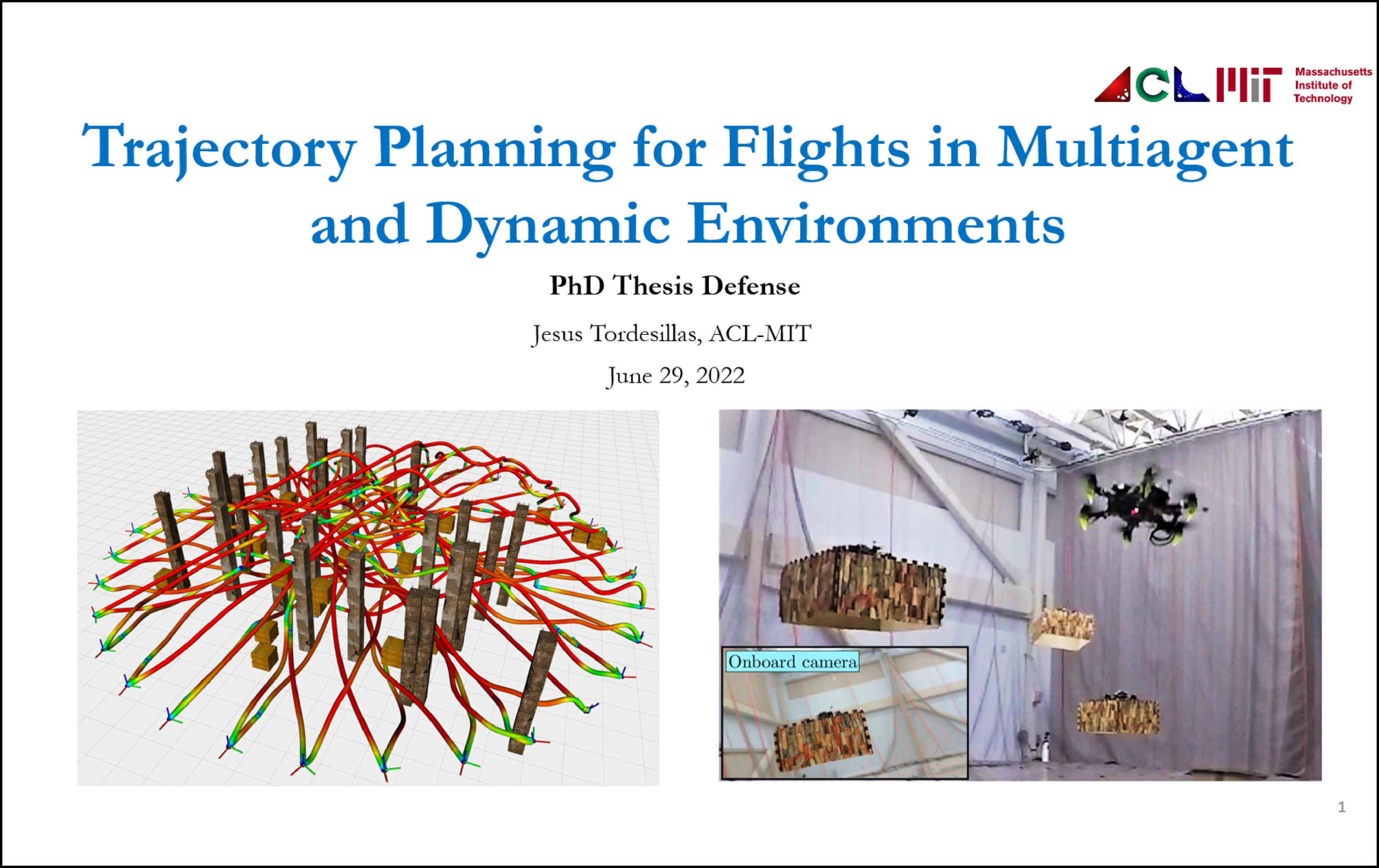
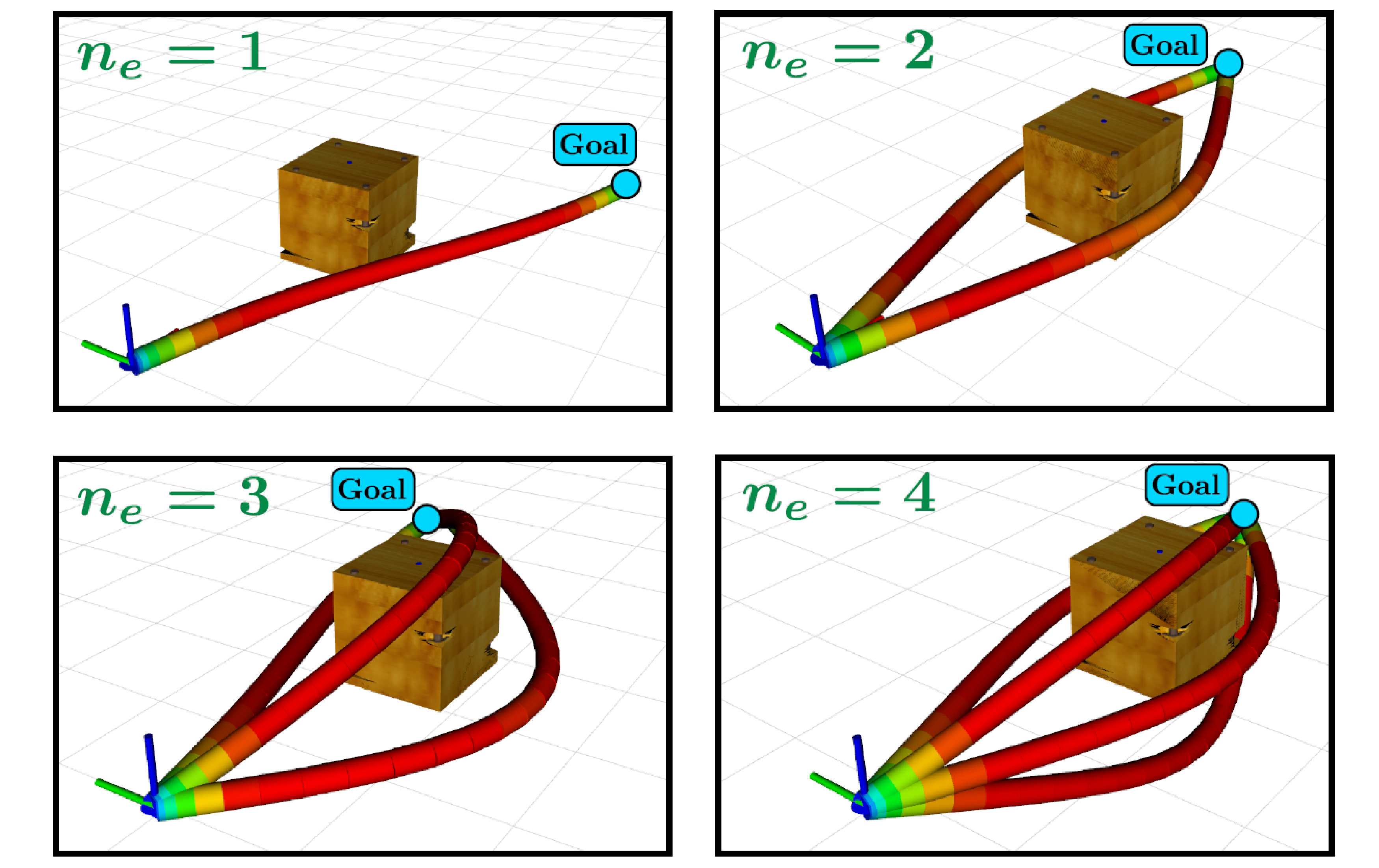
PhD Thesis
Trajectory Planning for Flights in Multiagent and Dynamic Environments
Video of the defense Dissertation

LION Estimator
Lidar-Inertial Observability-Aware Navigator for Vision-Denied Environments.
1st place in Urban Circuit (Darpa Subt. Challenge)
Paper Video ISER 2020

Traversability
Autonomous Navigation in GPS-Denied and Perceptually-Degraded Environments
2nd place in Tunnel Circuit (Darpa Subt. Challenge)
Paper Video ISER 2020
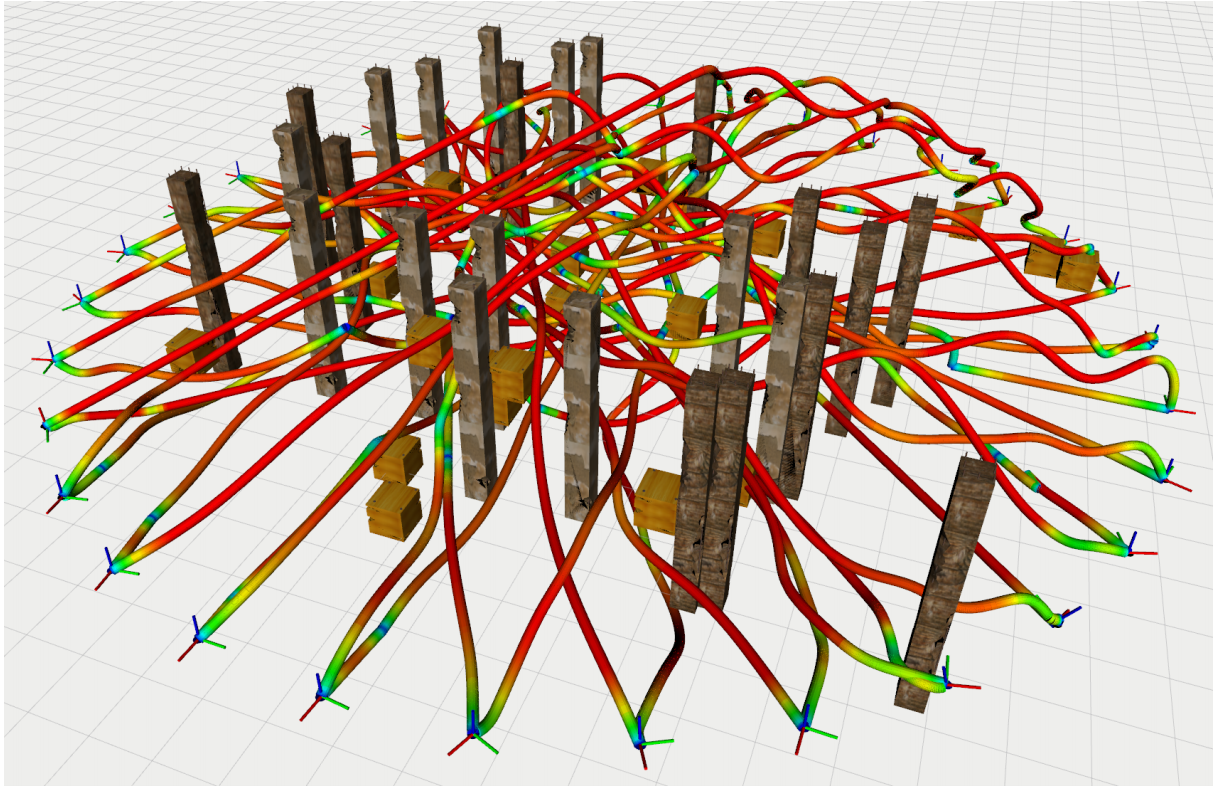
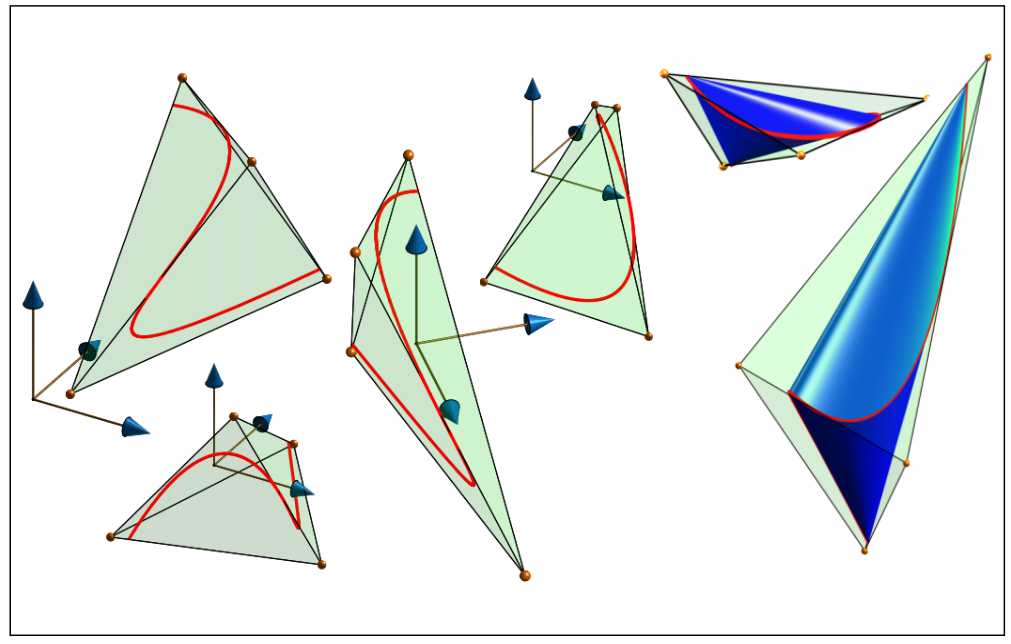
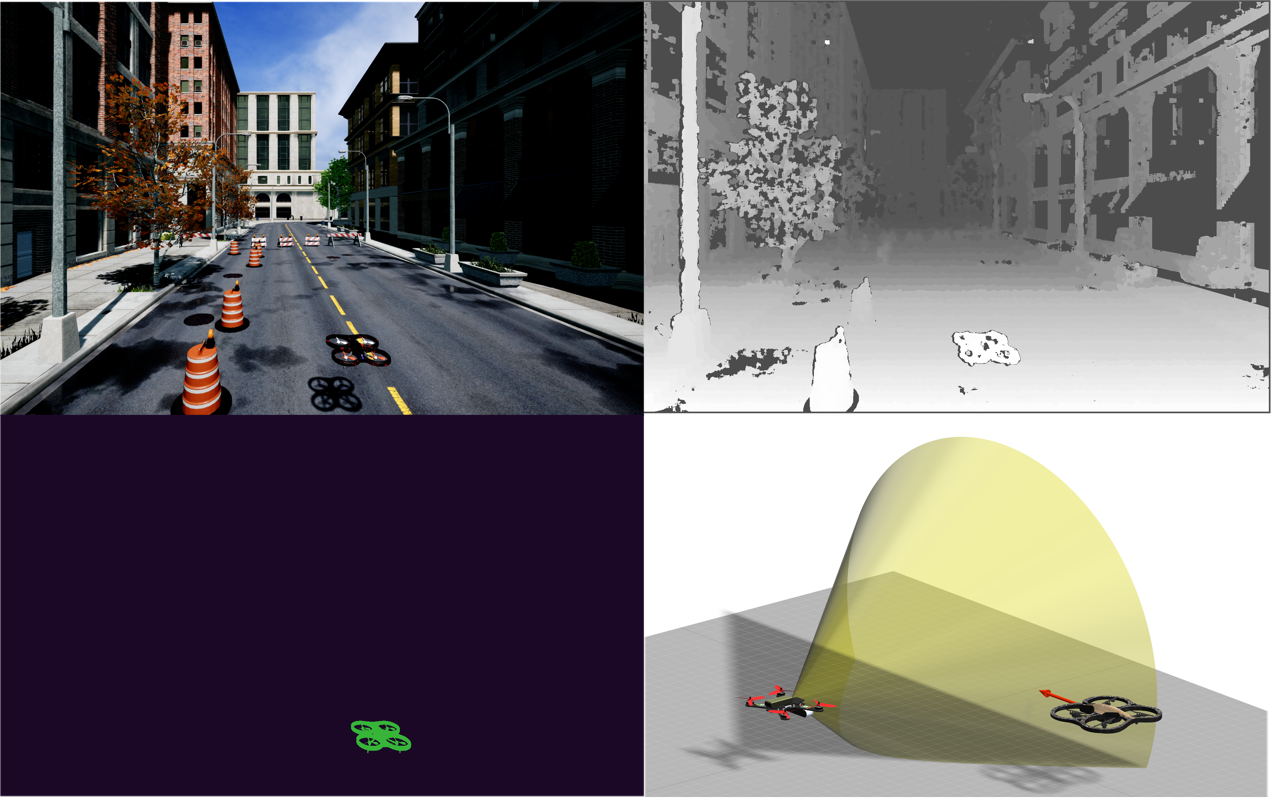
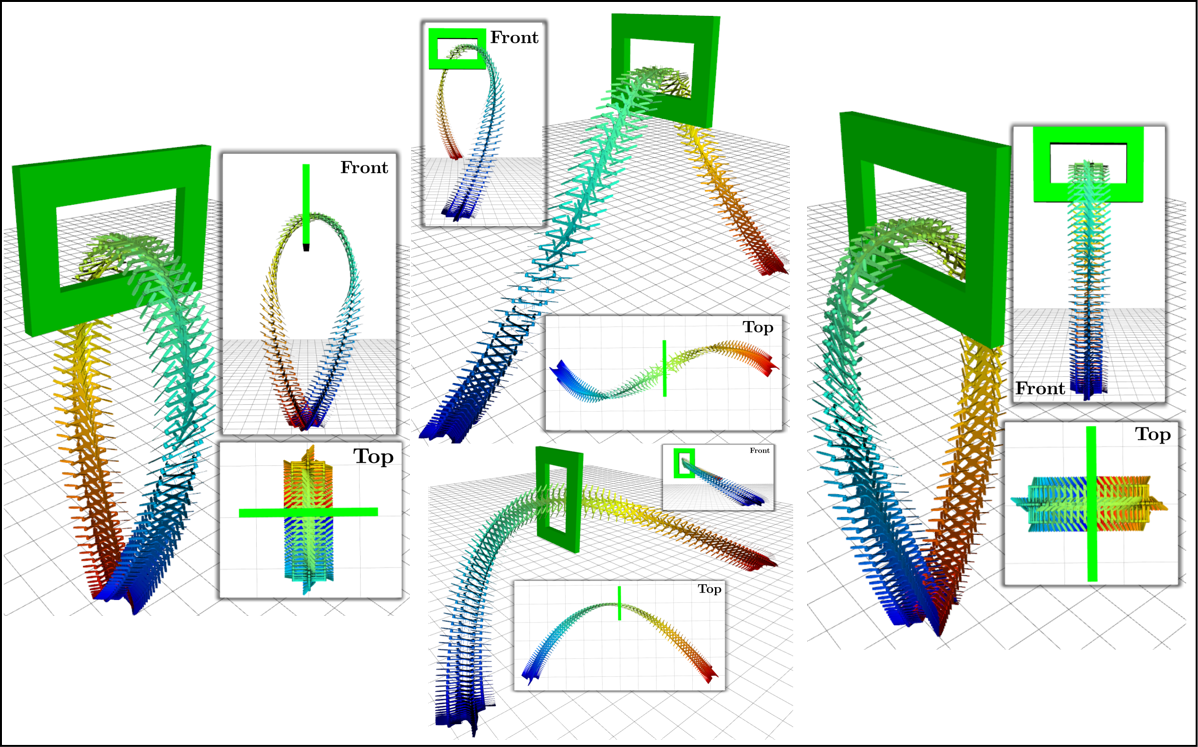
FASTER Planner
Fast and Safe Trajectory Planner for Navigation in Unknown Environments.
Finalist: Best Paper Award in Search and Rescue Robotics
IROS Paper T-RO Paper Video Code T-RO and IROS 2019

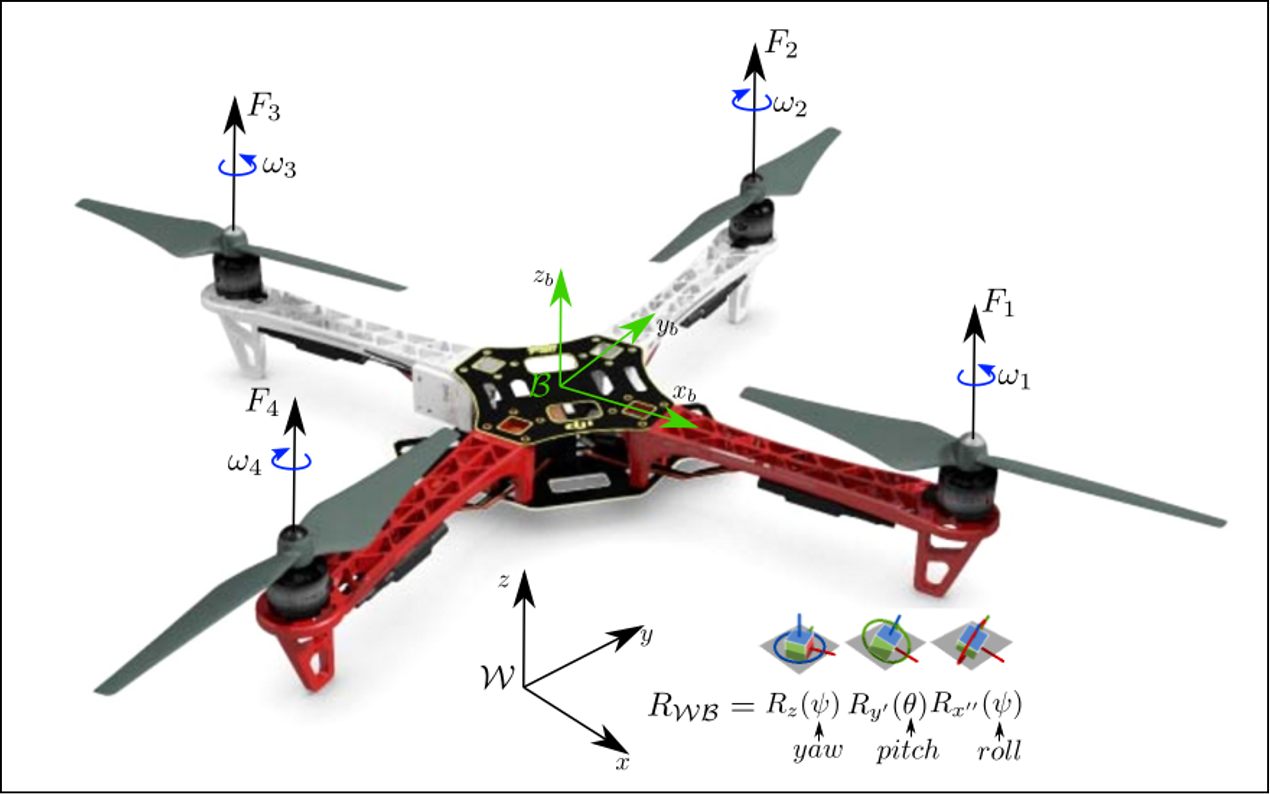
Aerial Manipulation
Agile Plate Transport with a Hexacopter with Canted Motors.
Video

Reinforcement Learning vs Opt. Control
A numerical comparison of performance and robustness in model-based and model-free methodologies.
Paper

Robotic Manipulator
Robotic Manipulator design and building using Arduino and LabView.
Video
FPGA and VHDL
Schematic design and implementation on a FPGA.
Schematic designed