Overview
Near-space photography is an emerging hobby. High Altitude Balloons (HAB), also known as "poor man’s satellites", are used to send cameras into the low-to-mid levels of the stratosphere, taking images and videos of earth and space. An altitude of 100,000 feet (~30 km) provides a remarkable and unusual vantage point to the blue curving earth and black expense of space. Together with the increasing availability of cheap cameras and GPS/Satellite tracking equipment - this has drawn the attention of both amateur photographers as well as space and robotics enthusiasts.
On March 30 2012, we have made our first attempt at near-space photography. We did most of the research and bought the equipment during MIT's Independent Activities Period (IAP) between the fall and spring semesters - a good chance to take a bit of time off research and work on such a project - but had the chance to finish it only during the week of spring break.
Near-space photography has been attempted quite a few times before (see some references below), therefore we figured it would be fun to try some more challenging conditions to photograph such as the sunset and the transition from day-time to night-time. In typical photography, lower lighting conditions are compensated by longer camera exposure, however this is impossible to do in HABs due do the rapid motion of the balloon. We can however record videos and apply some image and video manipulations in post-processing as we show below.
The videos we captured are wide-angle 1080p (1920x1080 resolution) from two camera viewpoints - one facing downwards towards earth and one facing sideways towards the horizon. With the cameras we also sent up an HTC phone running Android, for which we wrote a small program to record accelerometer, magnetometer and GPS readings. We are glad to share our raw and processed data. Our raw videos are of higher quality than the videos shown below that are further compressed by YouTube. If you would like to use our data contact Michael or Adrian.
In The News
Tomas Saraceno Conversations: Art & Atmosphere
The lengths I go to, to recover my payload : Fishing
Videos
Here are a few short snippets from the videos we recorded. Once the video is playing you can change the quality of the displayed video using the "Change quality" (![]() ) icon in the lower right part of the player.
) icon in the lower right part of the player.
Side view, 7:28 pm, ~60000 feet (18 km)
|
Side view, 8:01pm, ~79000 feet (24 km)
|
Bottom view, 6:12pm, ~13000 feet (4 km). We believe the vignetting-like effect is due to light reflecting from the Styrofoam box near the camera opening. In future designs we will cover those edges with some dark material.
|
Bottom view, 7:19pm, ~54000 feet (16 km)
|
Plane viewed from 48000 feet (14.5 km). Turn audio on to hear the jet engines.
|
Balloon launch and the first 5 minutes of the flight. |
Processing
Here is some interesting postprocessing that can be done on the videos.
Lens Distortion Correction
| Lens distortion correction using Optics Compensation Effect in Adobe After Effects CS5. We recommend viewing in full screen and max resolution. |
Denoising
Video denoising results using the method of [8]. We recommend viewing these in full screen and max resolution. |
Dehazing (Seeing through clouds/haze)
Bottom view at 37500 feet. This type of video should be a good candidate for a dehazing algorithm. |
Design
The payload is attached to helium-filled weather balloon and launched into the atmosphere. Retrieval is made possible via a GPS signal from a device that's part of the payload. Our payload included two GOPro HD Hero 2 cameras, an HTC HD2 phone with attached Duracell USB battery, and a SPOT GPS transmitter. The cameras were facing down and sideways, respectively, and the cell phone was also taking pictures facing down.
 |
 |
 |
 |
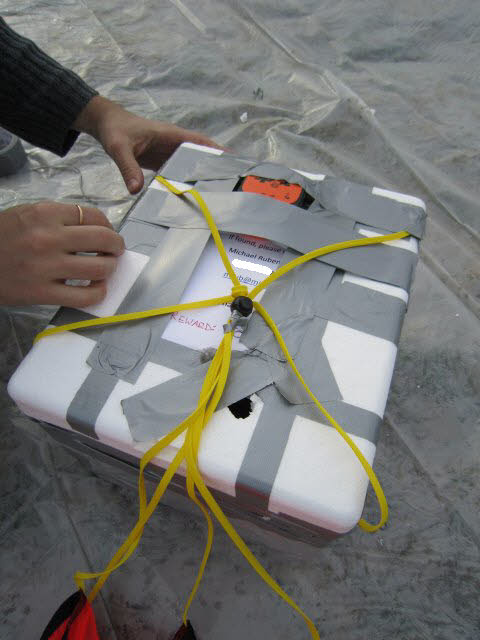 |
Snapshots of the capsule
For the capsule box we used a thick Styrofoam cooler. In preliminary crash tests we found that the thicker boxes survive the impact significantly better than thinner boxes. We used foam padding inside the box to cushion the electronics during impact and to keep them tight in place.
The most crucial part of the setup is the GPS tracker, as without it we would lose the capsule. We discovered that SPOT had problem transmitting when put inside the box. We were not sure whether this was due to the Styrofoam (shouldn't be), or the proximity to the other devices (the cellphone was also set to record GPS signal) or the aluminum wrapping. To be on the safe side, we eventually decided to attach it facing upwards on top of the box via duct tape. This was a last-minute patch right before the launch.
All our equipment is listed in the following table. The overall cost was just over $2K, including cost for retreival (see below).
| Cameras | 2x GoPro HD Hero 2 with Battery Pac and SanDisk 32GB class 10 SD cards |
| Additional sensors | HTC HD2 cell phone with SanDisk microSDHC 8GB class 2 memory card, Android 2.3.7 and In-house code, |
| Additional battery | Duracell USB Charger |
| GPS transmitter | SPOT Satellite GPS Messenger; requires yearly subscription |
| Balloon | Scientific Sales 800g Weather Balloon |
| Parachute | Rocketman 5' Recovery Parachute |
| Capsule box | 15x9x8 Styrofoam Cooler |
| Helium | Balloon Grade Helium 300 Tank with Radnor RPB-6HG Regulator via Airgas |
Launch
We launched on Friday, March 30 2012, near Albany NY. In a nutshell, the trajectory of the balloon was significantly different from the prediction (below) and the balloon landed in water, Buzzards bay, right off cape cod. It has made an amazing distance of about 150 miles over 4 states in 3 hours!
You can see the positions transmitted back from the balloon in the Google map below. After Southbridge, keypoint 16, the balloon has passed 60,000 feet at which points it stops transmitting until close to landing.
Remarkably, the capsule started floating in the bay transmitting back its location (you can see the drift motion by zooming into to the landing area). However, we weren't able to retrieve it the first day and then the signal was lost. On Saturday noon, at the point where we were sure we had lost it, it suddenly started transmitting its location again, which allowed us to head back to the cape, hire a boat, and retrieve it!
Launch Site
We used UCambridge Landing predictor and Balloon trajectory forecasts at the University of Wyoming for predicting the balloon trajectory. In trying to avoid landing in the ocean, we travelled from Cambridge, MA west towards Albany, NY to match a predicted landing near Worcester, MA. We found a nice field near East Greenbush, 6 miles from Albany. We also notified the FAA of our launch and expected trajectory. The final launch was at 5:50 PM.

Panoramic view of the launch site
 |
Launch time-lapse
Balloon Trajectory
GPS coordinates were sent by SPOT every 10 minutes until it reached 60,000 feet, at around 6:57 PM, over Southbridge, MA (which indicated the balloon was going faster than predicted). By all accounts, we expected to lose the signal for 30-60 minutes, maybe 90 minutes at the outmost. By 9 PM, we had given up hope of a re-surfaced signal, but a signal appeared at 9:06 PM. Unfortunately, the signal came from Buzzard's Bay.
Balloon trajectory. View larger map
Retrieval
At around 4pm on Saturday, we took a boat from the nearby Marion harbor, with the help of Captain John, and managed to recover the capsule close to Bird Island - a small island with a historic lighthouse. The capsule and electronics were soaked in seawater for 19 hours. We cleaned them by fully rinsing them in clean water and rubbing alcohol several times to eliminate the salt deposits, and finally we dried them with hairdryer, fan and rice. All electronics survived and are now fully functional.
 |
 |
Boat ride and recovering the capsule
References
- Project Icarus: A step-by-step recount of the original $150 balloon launch
- Near Space Balloon Flight, shot with HD HERO cameras from GoPro
- HALO Helium Balloon Mission to Near-Space
- Project Aether
- Satellites on a Budget – High Altitude Balloons
- Paul Verhage's ebook on near space ballooning
- Android in Near Space
- A High-Quality Video Denoising Algorithm based on Reliable Motion Estimation
 |
Last updated: April 2012