Time-Optimal
Time-Optimal Control of Flexible Structures
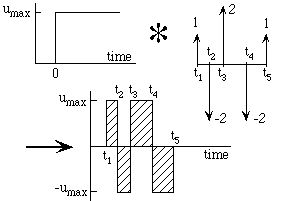
The time-optimal control for many types of systems is a series of alternating sign pulses, where the amplitude of the pulses is equal to the maximum actuator effort. The time-optimal command can be generated with input shaping if the amplitudes have the correct values. For example, if the amplitudes are 1, -2, 2, -2, 1, then convolution of the shaper with a step input will produce an on-off command profile.
 Time-optimal control is similar to generating shaped commands for on-off actuators. However, fuel-efficiency and deflection limiting are not possible because the command would be slowed down by the extra constraints.
Time-optimal control is similar to generating shaped commands for on-off actuators. However, fuel-efficiency and deflection limiting are not possible because the command would be slowed down by the extra constraints.