Crane Control
Crane Controllers
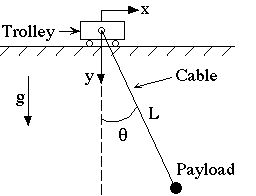
I have recently started working on controllers for cranes. The first system I worked on was a planar gantry crane.
 The goal of this research is to develop control methods that yield low levels of both transient and residual oscillations. We will not attempt to obtain exactly zero residual vibration. This has been attempted previously for several types of cranes. When zero residual is required, the solution is somewhat difficult to obtain and implement. By relaxing our goals to merely low levels of residual, we hope to obtain a method which both easy to derive and implement.
The goal of this research is to develop control methods that yield low levels of both transient and residual oscillations. We will not attempt to obtain exactly zero residual vibration. This has been attempted previously for several types of cranes. When zero residual is required, the solution is somewhat difficult to obtain and implement. By relaxing our goals to merely low levels of residual, we hope to obtain a method which both easy to derive and implement.